按教程10.5的方法开始建图
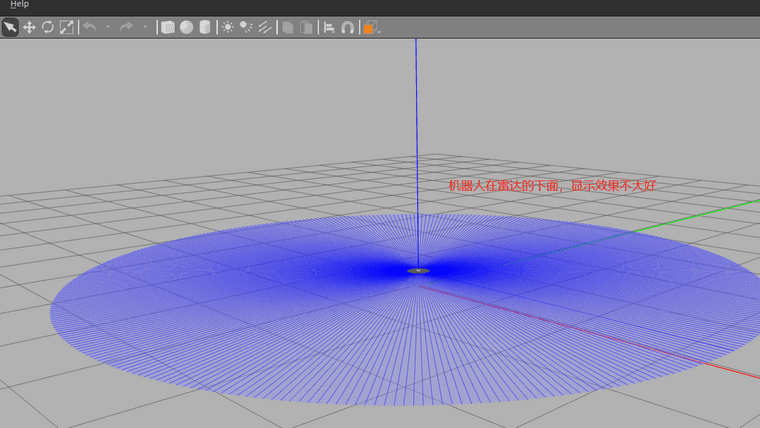
步骤1:按上1章节 fishbot_description gazebo.launch.py 的代码,运行可以在gazebo中显示机器人;
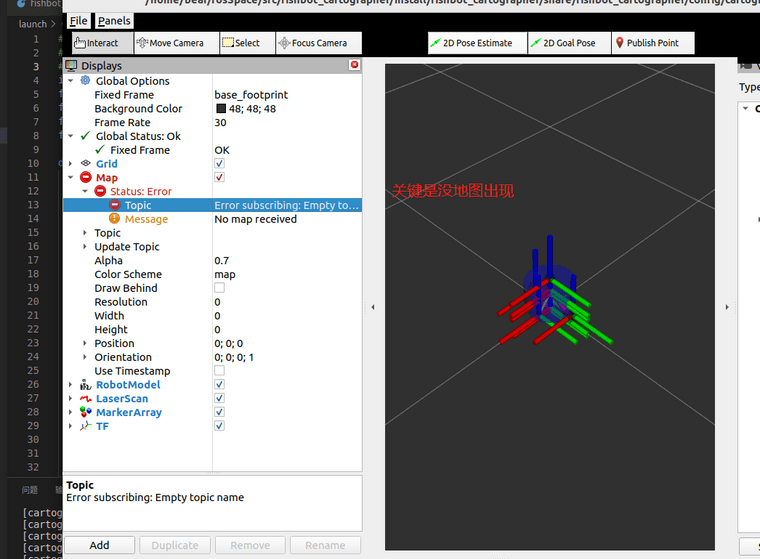
步骤2:运行本章节的代码,显示效果如下,无法显示机器人,如下图
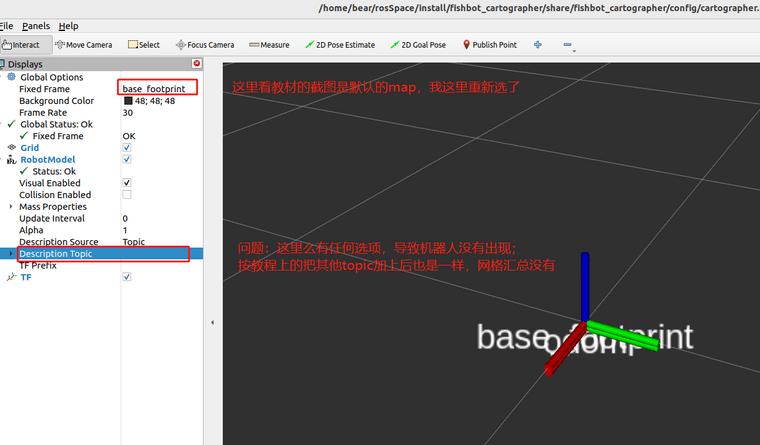
问题:为啥没机器人显示,按教材把topic加上也是;
翻阅了下贴吧里的没找到跟我相同的问题,所以才发个帖子来麻烦你,谢谢
我再截图下gazebo的显示效果
代码是跟教程中的一摸一样的,运行起来没见报错,已退出了miniconda
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
154453683 发布的最佳帖子
-
建图,rvz2不显示机器人发布在 综合问题
154453683 发布的最新帖子
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
鱼哥,按你的教程都搞了一遍,非常赞。
但导航目前是在rviz中点击的,啥时候出一个能用代码实现的教程:
1.初次建图跟扫地机器人一样,自己走一圈建图
2.建图后,下次开机的初始定位、导航均用代码实现 -
RE: 拓展2:FishBot配套雷达驱动教程(源码版)发布在 FishBot机器人
@小鱼 在 拓展2:FishBot配套雷达驱动教程(源码版) 中说:
fishbot_laser
无线驱动这段没看懂呢,有线的跑通了
这个python运行后,是谁来连接它呢?
我运行后处于 Prepare to Accept connect!状态
然后我把ydlidar_ros2/params/ydlidar.yaml 改为 port: /tmp/fishbot_laser
编译后,运行会time out,解决:作者这段py的端口号要改为8889,因为雷达板默认配的是8889
希望可以给后来者 -
RE: 拓展3:FishBot 树莓派配置建图导航发布在 FishBot机器人
小鱼,麻烦帮看看
我ubuntu环境,第三步运行结果如图:
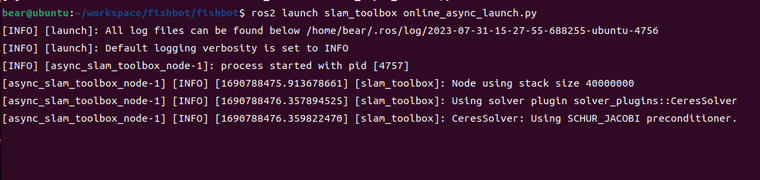
这种是预期结果吗?
因为没弹出rviz2,我单独再打开rviz2也看不到地图;
话题 /scan /map /tf 都是有的
如果这种状态尝试保存地图会出错
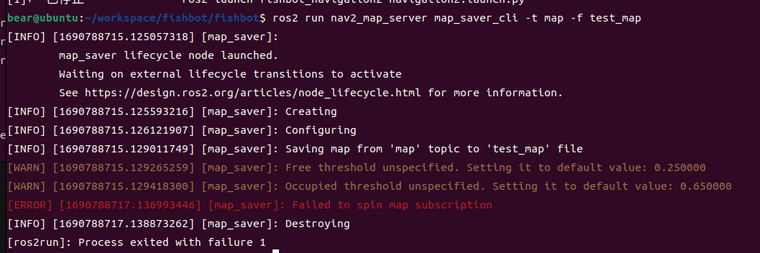
补充一点:雷达使用的是拓展1中的有线模式
rviz2中,map插件状态提示: no map received -
RE: esp32如何通过tcp协议订阅话题发布在 综合问题
如果有人碰到跟我一样的问题,请使用这个包
lib_deps =
https://github.com/micro-ROS/micro_ros_arduino
这个包串口和tcp都是好的,包里自带example可以参考 -
esp32如何通过tcp协议订阅话题发布在 综合问题
你好
使用microRos的时候碰到个问题
串口的代码是 set_microros_serial_transports(Serial);
如果想通过tcp协议接收订阅如何改代码呢,我只找到了set_microros_wifi_transports这个方法,是只需要替换这一行代码吗?
感谢解答疑问 -
关于MicoROS碰到的问题发布在 ROS2
您好,跟着教材做MicroROS :话题订阅 - 控制led
出现问题请指教
esp32代码按教材写好发布,运行命令是成功的,led会亮或暗
ros2 topic pub /led_control std_msgs/msg/Int32 "{data: 0}" --once
但ros2的代码不会写,代码如下:

led灯没有效果,怀疑是红框中的String类型不对,但改成int后,运行起来会报类型错误,请问ros2的python代码该如何写?