@小鱼 是 glog安装重了,之前相机驱动装了个 glog0.6
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1157354382 发布的帖子
-
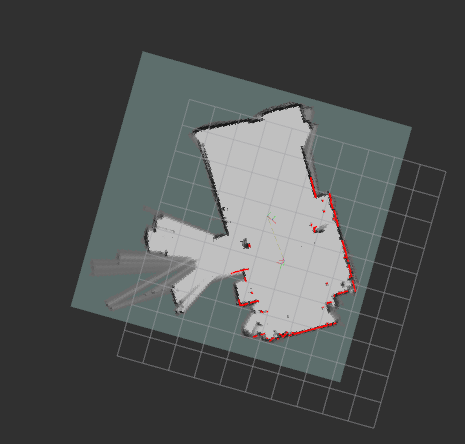
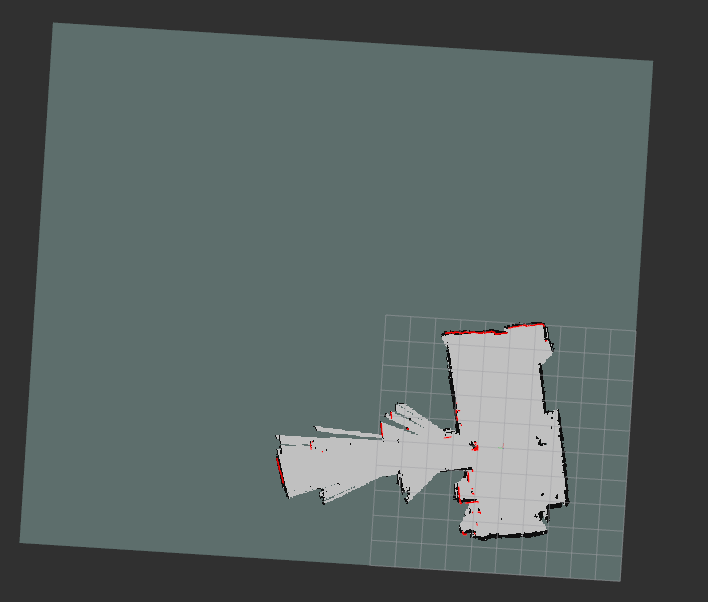
humble orbslam3 rgb-d发布在 ROS2
ros2 humble 做 orbslam3
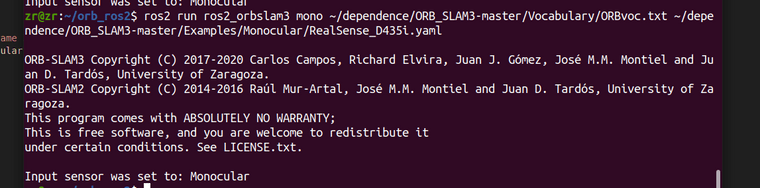
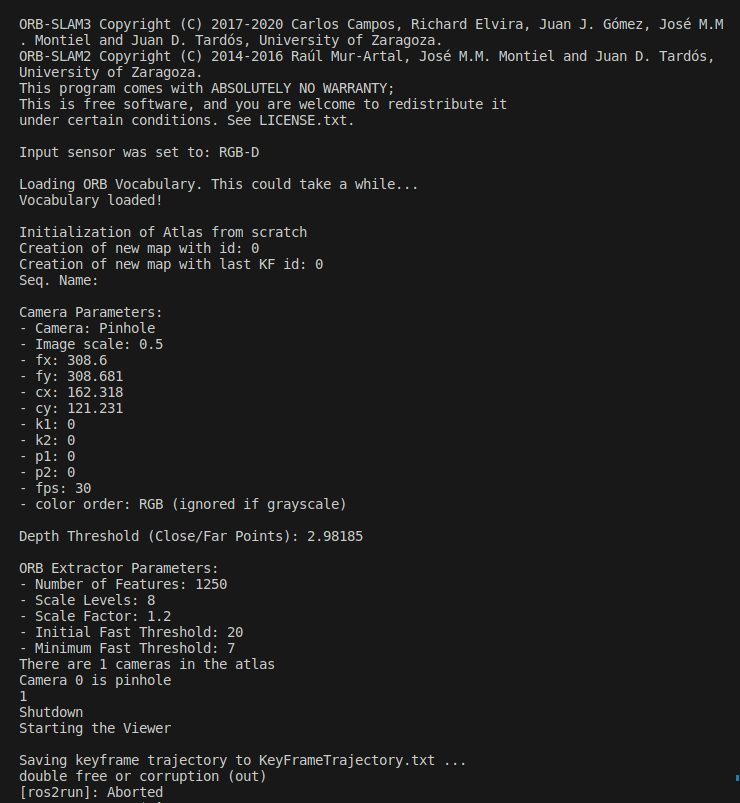
使用 RGB-D 相机时,加载完词典和相机参数后,程序直接退出
查看代码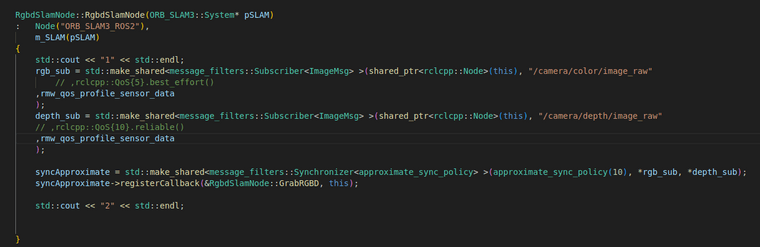
程序只执行到 1,随后的订阅话题好像没有执行,连 2 都没执行,修改 qos也没啥用,使用单目到是能 正常建图,请问这需要修改哪里呢 -
humble 导航发布在 Nav2
ROS2 humble
在导航中 会出现以下警告:[lifecycle_manager-13] 2023-08-16 20:14:03.433 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts [lifecycle_manager-13] 2023-08-16 20:14:04.457 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts [lifecycle_manager-13] 2023-08-16 20:14:05.396 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts这是什么东西,是因为我的ros没下载好吗,我在galactic中似乎没遇到这种情况
-
RE: ros2机器人foxy版用笔记本摄像头跑单目orb_slam3发布在 移动平台分享
@毛哥成山轮胎机油保养 我看了一眼里面的代码,好像执行到这一步就没了好像是直接死掉了

后面哪怕我加了 cout 也不显示,但是我用 ./运行 exalmple,就能正常显示,我不懂啊

-
carto纯定位发布在 Nav2
是ros2 galactic
我想使用 cartographer的纯定位去替换amcl的定,因为carto定位不是可以自定位嘛,定位是已经成功了,但是他不自定位,这是沙情况呢。另外我的carto是apt安装的。
附上 localization.luainclude "2d_slam.lua" TRAJECTORY_BUILDER.pure_localization = true -- fast localization MAP_BUILDER.num_background_threads = 12 POSE_GRAPH.constraint_builder.sampling_ratio = 0.5 * POSE_GRAPH.constraint_builder.sampling_ratio POSE_GRAPH.global_sampling_ratio = 0.1 * POSE_GRAPH.global_sampling_ratio POSE_GRAPH.max_num_final_iterations = 1 POSE_GRAPH.optimize_every_n_nodes = 2
-
orb_slam3在ros2 galactic下安装发布在 ROS2
版本为 ros2 galactic
在安装 orb_slam3 时出现以下错误

观察到 只要是 /usr/local/include/sophus 这个路径下的文件,都出现相同错误,请问这是什么原因呢。
eigen3 是 3.3.7
Sophus VERSION 1.22.10 -
RE: 一行命令转换ROS1 bag和ROS2 bag发布在 ROS2
你好 大佬 我在安装后 还是找不到 该命令,请问一下这该怎么办呢!
zr@zr:~$ pip install rosbags Requirement already satisfied: rosbags in ./.local/lib/python3.8/site-packages (0.9.15) Requirement already satisfied: lz4 in /usr/lib/python3/dist-packages (from rosbags) (3.0.2+dfsg) Requirement already satisfied: zstandard in ./.local/lib/python3.8/site-packages (from rosbags) (0.21.0) Requirement already satisfied: numpy in /usr/lib/python3/dist-packages (from rosbags) (1.17.4) Requirement already satisfied: ruamel.yaml in ./.local/lib/python3.8/site-packages (from rosbags) (0.17.32) Requirement already satisfied: ruamel.yaml.clib>=0.2.7; platform_python_implementation == "CPython" and python_version < "3.12" in ./.local/lib/python3.8/site-packages (from ruamel.yaml->rosbags) (0.2.7) zr@zr:~$ rosbags-convert 2017-06-08-15-49-45_0.bag rosbags-convert:未找到命令