重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1769564038 发布的最新帖子
-
RE: Unable to identify any set of controllers that can actuate the specified joints:发布在 机械臂运动规划

-
RE: Unable to identify any set of controllers that can actuate the specified joints:发布在 机械臂运动规划
@1769564038 在 Unable to identify any set of controllers that can actuate the specified joints: 中说:
1. 这是我robot_bringup_moveit.launch 的内容
<launch> <!-- 1. Launch Gazebo --> <include file="$(find robot_gazebo)/launch/my_robot_gazebo_xacro.launch" /> <!-- 2. ros_control arm launch --> <include file="$(find robot_gazebo)/launch/robot_gazebo_states.launch" /> <!-- 3. ros_control trajectory --> <include file="$(find robot_gazebo)/launch/robot_trajectory_control.launch" /> <!-- 4. moveit launch --> <include file="$(find my_robot_moveit_config)/launch/moveit_planning_execution.launch" /> </launch>2.这是src/robot_gazebo/launch/robot_gazebo_states.launch
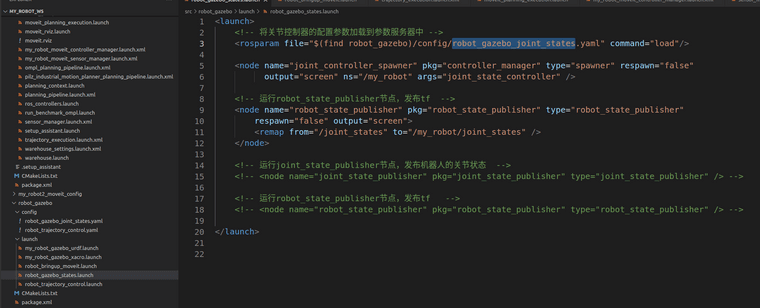
<launch> <!-- 将关节控制器的配置参数加载到参数服务器中 --> <rosparam file="$(find robot_gazebo)/config/robot_gazebo_joint_states.yaml" command="load"/> <node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/my_robot" args="joint_state_controller" /> <!-- 运行robot_state_publisher节点,发布tf --> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen"> <remap from="/joint_states" to="/my_robot/joint_states" /> </node> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 --> <!-- <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> --> <!-- 运行robot_state_publisher节点,发布tf --> <!-- <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> --> </launch>3. src/robot_gazebo/launch/robot_trajectory_control.launch
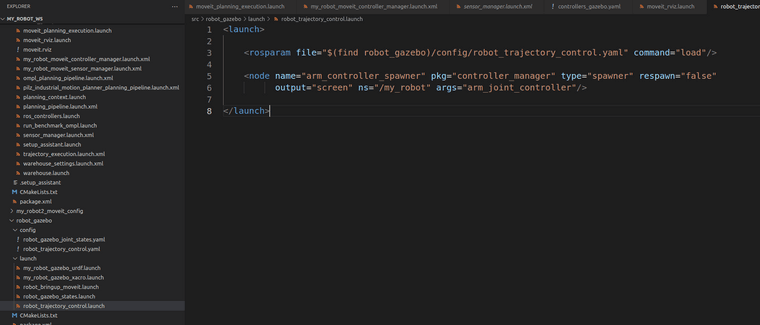
<launch> <rosparam file="$(find robot_gazebo)/config/robot_trajectory_control.yaml" command="load"/> <node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/my_robot" args="arm_joint_controller"/> </launch>4. src/robot_gazebo/config/robot_gazebo_joint_states.yaml
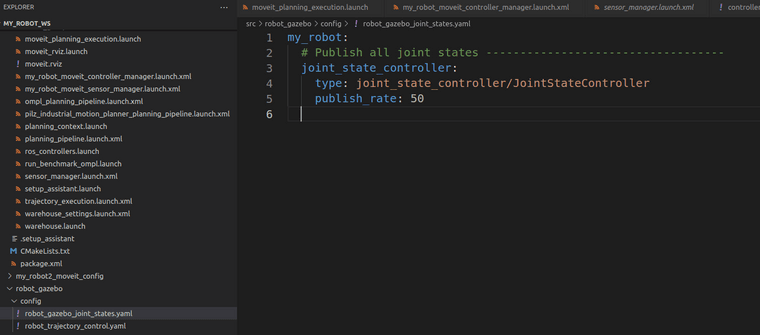
my_robot: # Publish all joint states ----------------------------------- joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 505.src/robot_gazebo/config/robot_trajectory_control.yaml
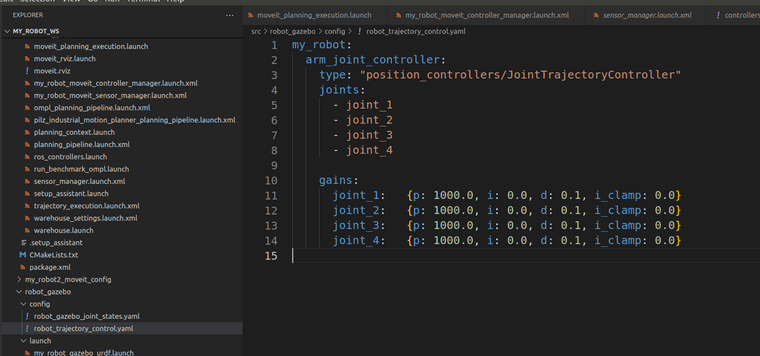
my_robot: arm_joint_controller: type: "position_controllers/JointTrajectoryController" joints: - joint_1 - joint_2 - joint_3 - joint_4 gains: joint_1: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_2: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_3: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_4: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}6. src/my_robot_moveit_config/config/controllers_gazebo.yaml
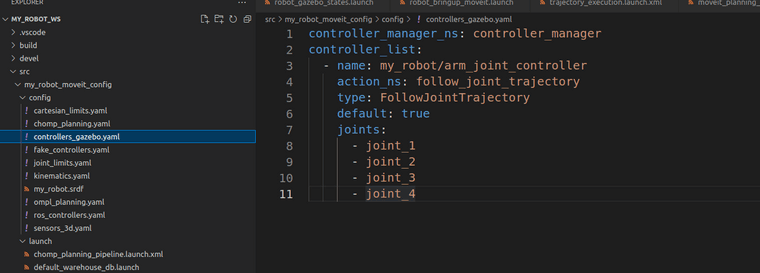
controller_manager_ns: controller_manager controller_list: - name: my_robot/arm_joint_controller action_ns: follow_joint_trajectory type: FollowJointTrajectory default: true joints: - joint_1 - joint_2 - joint_3 - joint_47. src/my_robot_moveit_config/launch/my_robot_moveit_controller_manager.launch.xml
<launch> <!-- Define the controller manager plugin to use for trajectory execution --> <!-- <param name="moveit_controller_manager" value="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> --> <arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager"/> <param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/> <!-- loads controller list to the param server --> <rosparam file="$(find my_robot_moveit_config)/config/controllers_gazebo.yaml"/> </launch>
-
RE: Unable to identify any set of controllers that can actuate the specified joints:发布在 机械臂运动规划
1. 这是我robot_bringup_moveit.launch 的内容
<launch> <!-- 1. Launch Gazebo --> <include file="$(find robot_gazebo)/launch/my_robot_gazebo_xacro.launch" /> <!-- 2. ros_control arm launch --> <include file="$(find robot_gazebo)/launch/robot_gazebo_states.launch" /> <!-- 3. ros_control trajectory --> <include file="$(find robot_gazebo)/launch/robot_trajectory_control.launch" /> <!-- 4. moveit launch --> <include file="$(find my_robot_moveit_config)/launch/moveit_planning_execution.launch" /> </launch>2.这是src/robot_gazebo/launch/robot_gazebo_states.launch
<launch> <!-- 将关节控制器的配置参数加载到参数服务器中 --> <rosparam file="$(find robot_gazebo)/config/robot_gazebo_joint_states.yaml" command="load"/> <node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/my_robot" args="joint_state_controller" /> <!-- 运行robot_state_publisher节点,发布tf --> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="false" output="screen"> <remap from="/joint_states" to="/my_robot/joint_states" /> </node> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 --> <!-- <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> --> <!-- 运行robot_state_publisher节点,发布tf --> <!-- <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> --> </launch>3. src/robot_gazebo/launch/robot_trajectory_control.launch
<launch> <rosparam file="$(find robot_gazebo)/config/robot_trajectory_control.yaml" command="load"/> <node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/my_robot" args="arm_joint_controller"/> </launch>4. src/robot_gazebo/config/robot_gazebo_joint_states.yaml
my_robot: # Publish all joint states ----------------------------------- joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 505.src/robot_gazebo/config/robot_trajectory_control.yaml
my_robot: arm_joint_controller: type: "position_controllers/JointTrajectoryController" joints: - joint_1 - joint_2 - joint_3 - joint_4 gains: joint_1: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_2: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_3: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0} joint_4: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
-
RE: Unable to identify any set of controllers that can actuate the specified joints:发布在 机械臂运动规划
- roslaunch robot_gazebo robot_bringup_moveit.launch
这是我启动的指令,然后在rviz里面点击execute的时候报的错误如下错误
[ERROR] [1669182292.117079150, 31.722000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ] [ERROR] [1669182292.117153787, 31.722000000]: Known controllers and their joints: [ERROR] [1669182292.117213348, 31.722000000]: Apparently trajectory initialization failed-
我是想在gazebo里面动起来,通过rvize界面发送指令让仿真机械臂动起来。
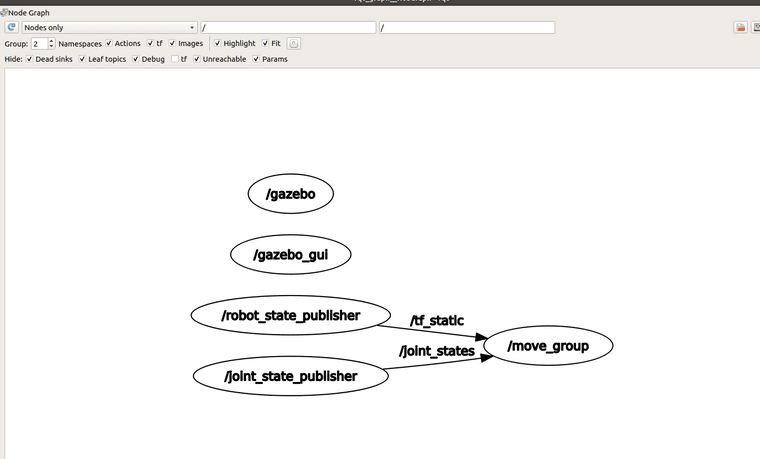
## rostopic list
(base) huangjie@huangjie-Legion-Y7000P-IAH7:~$ rostopic list /attached_collision_object /clock /collision_object /execute_trajectory/cancel /execute_trajectory/feedback /execute_trajectory/goal /execute_trajectory/result /execute_trajectory/status /gazebo/link_states /gazebo/model_states /gazebo/parameter_descriptions /gazebo/parameter_updates /gazebo/set_link_state /gazebo/set_model_state /joint_states /move_group/cancel /move_group/display_contacts /move_group/display_planned_path /move_group/feedback /move_group/goal /move_group/monitored_planning_scene /move_group/ompl/parameter_descriptions /move_group/ompl/parameter_updates /move_group/plan_execution/parameter_descriptions /move_group/plan_execution/parameter_updates /move_group/planning_scene_monitor/parameter_descriptions /move_group/planning_scene_monitor/parameter_updates /move_group/result /move_group/sense_for_plan/parameter_descriptions /move_group/sense_for_plan/parameter_updates /move_group/status /move_group/trajectory_execution/parameter_descriptions /move_group/trajectory_execution/parameter_updates /my_robot/joint_states /pickup/cancel /pickup/feedback /pickup/goal /pickup/result /pickup/status /place/cancel /place/feedback /place/goal /place/result /place/status /planning_scene /planning_scene_world /probot_anno/joint_states /recognized_object_array /rosout /rosout_agg /rviz_huangjie_Legion_Y7000P_IAH7_6963_1349828747475093352/motionplanning_planning_scene_monitor/parameter_descriptions /rviz_huangjie_Legion_Y7000P_IAH7_6963_1349828747475093352/motionplanning_planning_scene_monitor/parameter_updates /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full /tf /tf_static /trajectory_execution_event## rostopic echo /joint_states
(base) huangjie@huangjie-Legion-Y7000P-IAH7:~$ rostopic echo /joint_states header: seq: 3954 stamp: secs: 395 nsecs: 401000000 frame_id: '' name: [joint_1, joint_2, joint_3, joint_4] position: [0.0, 0.0, 0.0, 0.0] velocity: [] effort: [] --- header: seq: 3955 stamp: secs: 395 nsecs: 500000000 frame_id: '' name: [joint_1, joint_2, joint_3, joint_4] position: [0.0, 0.0, 0.0, 0.0] velocity: [] effort: [] --- header: seq: 3956 stamp: secs: 395 nsecs: 600000000 frame_id: '' name: [joint_1, joint_2, joint_3, joint_4] position: [0.0, 0.0, 0.0, 0.0] velocity: [] effort: []
- roslaunch robot_gazebo robot_bringup_moveit.launch
-
RE: 机械臂moveit+gazebo 联合仿真报错发布在 机械臂运动规划
@Aquiver 大哥,我也是首先用古月居的anno跑了一遍,能在gazebo里面动起来。现在换成自己DIY的机械臂就报错了。
报错内容:[ERROR] [1669167751.277877941, 37.752000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ] [ERROR] [1669167751.277897873, 37.752000000]: Known controllers and their joints: [ERROR] [1669167751.277925647, 37.752000000]: Apparently trajectory initialization failed大哥知道怎么解决么,我名字都对上了。具体的我在社区提问了,大哥,帮忙看看怎么回事嘛,感激不尽。
-
RE: moveit+gazebo联合仿真,gazebo中的机械臂不跟着moveit中的联动发布在 机械臂运动规划
@2308607900 亲,我也遇到了相似的问题,在rviz里能动,但是到了gzebo里报错。
报错内容:
[ERROR] [1669167751.277877941, 37.752000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ]
[ERROR] [1669167751.277897873, 37.752000000]: Known controllers and their joints:[ERROR] [1669167751.277925647, 37.752000000]: Apparently trajectory initialization failed
亲,知道我这个是怎么回事么,我在社区也提问了,有更详细的配置信息。
-
RE: ROS moveit轨迹规划通信问题发布在 机械臂运动规划
@小鱼 道理都懂了,没有具体的代码,我还是不行呢,鱼哥。拿到moveit规划的数据过后,怎么传呢,那么长一窜的数据,又要对应到不同的舵机上去,真的不知道怎么写了。
-
Unable to identify any set of controllers that can actuate the specified joints:发布在 机械臂运动规划

版本:ros1
系统 :ubuntu18.04
类型:自建4自由度机械臂模型**错误:不能找到相应的关节,可以打开gazebo, 和Rviz, 也能在Rviz 里面拖动,但是拖动的时候gazebo里面没有相应的动作。
报错:
[ERROR] [1669167751.277877941, 37.752000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ]
[ERROR] [1669167751.277897873, 37.752000000]: Known controllers and their joints:[ERROR] [1669167751.277925647, 37.752000000]: Apparently trajectory initialization failed
另外,自己使用古月居的robot_anno配置成功过,现在换成自己DIY的机械臂导成URDF过后经过moveit配置以及修改确动不起来,还请大佬帮忙解决疑惑,感激不尽。
下面放出moveit_config和gazebo的主要配置文件
-
src/robot_gazebo/config/robot_trajectory_control.yaml
-
src/robot_gazebo/config/robot_gazebo_joint_states.yaml
3.src/robot_gazebo/launch/robot_trajectory_control.launch
-
src/robot_gazebo/launch/robot_gazebo_states.launch
-
src/my_robot_moveit_config/config/controllers_gazebo.yaml
-
src/my_robot_moveit_config/launch/my_robot_moveit_controller_manager.launch.xml

-