@altair-albert 请问外面一个link是指哪一个link哦,感谢感谢
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
363228894 发布的最新帖子
-
机械臂URDF文件内关节joint的orgin xyz参数是怎么确定的?发布在 机械臂运动规划
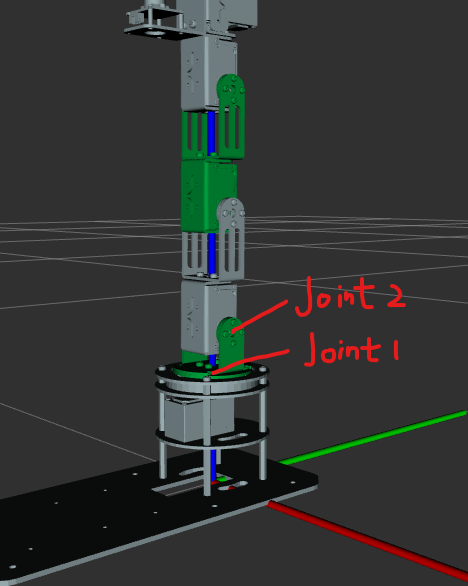
举例,这张图所示的机械臂模型,其关节joint1和joint2如图所示,他们的urdf文件内的origin xyz坐标参数分别是:(Fixed Frame设定的是机械臂底下第一个连杆)
joint1:<origin xyz="0 0 0.06605" rpy="-0.010805 0 0" />
joint2:<origin xyz="0 -0.00031873 0.04145" rpy="0 1.5708 0" />看辽半天没搞明白这个origin xyz参数是基于哪个坐标轴来写的(怎么z值越往上越小),还有在y方向上为什么有负值呢,请教各位大佬讲解一下,感谢感谢
-
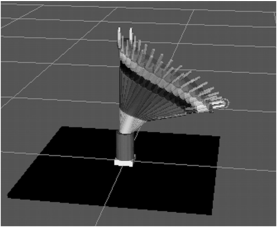
RE: 请问如何在RViz中显示机械臂的连续运动姿态(类似于拍照长曝光)发布在 综合问题
@小鱼 谢谢小鱼,已经在moveit里面跑过了,不过在小鱼提醒下,在planner path下找到老show trail,已经得到类似图片了