疑问来自大佬的博客:
https://blog.csdn.net/qq_27865227/article/details/120976841
请问对于realsense d435i(博客中给的是一般USB摄像头)来说,这个参数如何配置呢?:
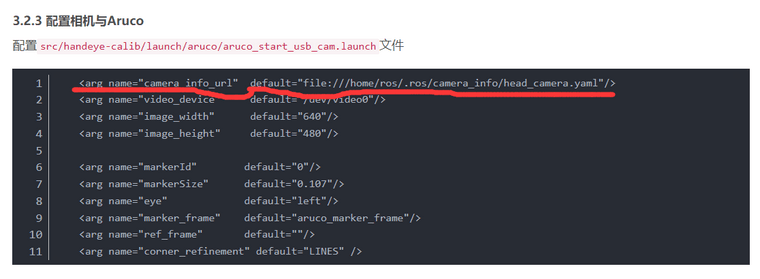
疑问来自大佬的博客:
https://blog.csdn.net/qq_27865227/article/details/120976841
请问对于realsense d435i(博客中给的是一般USB摄像头)来说,这个参数如何配置呢?:
本人按照教程```
https://fishros.org.cn/forum/topic/680/moveit-ikfast运动学插件配置-最详细-没有之一
Traceback (most recent call last):
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 9619, in <module>
chaintree = solver.generateIkSolver(options.baselink,options.eelink,options.freeindices,solvefn=solvefn)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 2320, in generateIkSolver
chaintree = solvefn(self, LinksRaw, jointvars, isolvejointvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 2915, in solveFullIK_6D
tree = self.TestIntersectingAxes(solvejointvars,Links, LinksInv,endbranchtree)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 3003, in TestIntersectingAxes
return self.solve6DIntersectingAxes(T0links,T1links,transvars,rotvars,solveRotationFirst=solveRotationFirst, endbranchtree=endbranchtree)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 3207, in solve6DIntersectingAxes
rottree += self.SolveAllEquations(AllEquations,curvars=currotvars,othersolvedvars=othersolvedvars,solsubs=self.freevarsubs[:],endbranchtree=storesolutiontree)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 6939, in SolveAllEquations
return self.AddSolution(solutions,AllEquations,curvars,othersolvedvars,solsubs,endbranchtree,currentcases=currentcases, currentcasesubs=currentcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 7039, in AddSolution
return [solution[0].subs(solsubs)]+self.SolveAllEquations(AllEquations,curvars=newvars,othersolvedvars=othersolvedvars+[var],solsubs=solsubs+self.Variable(var).subs,endbranchtree=endbranchtree,currentcases=currentcases, currentcasesubs=currentcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 6799, in SolveAllEquations
return self.AddSolution(solutions,AllEquations,curvars,othersolvedvars,solsubs,endbranchtree,currentcases=currentcases, currentcasesubs=currentcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 7305, in AddSolution
nextsolutions[var] = self.SolveAllEquations(AllEquations,curvars=newvars,othersolvedvars=othersolvedvars+[var],solsubs=solsubs+self.Variable(var).subs,endbranchtree=endbranchtree,currentcases=currentcases, currentcasesubs=currentcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 6799, in SolveAllEquations
return self.AddSolution(solutions,AllEquations,curvars,othersolvedvars,solsubs,endbranchtree,currentcases=currentcases, currentcasesubs=currentcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 7603, in AddSolution
newtree = self.SolveAllEquations(NewEquationsClean,curvars,othersolvedvars,solsubs,endbranchtree,currentcases=newcases, currentcasesubs=newcasesubs, unknownvars=unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 6782, in SolveAllEquations
rawsolutions=self.solveSingleVariable(self.sortComplexity(raweqns),curvar,othersolvedvars, unknownvars=curvars+unknownvars)
File "/usr/local/lib/python2.7/dist-packages/openravepy/openravepy/ikfast.py", line 8353, in solveSingleVariable
if Poly(enew,varsym.svar).TC() == S.Zero or Poly(enew,varsym.cvar) == S.Zero or Poly(enew,varsym.var) == S.Zero:
File "/root/.local/lib/python2.7/site-packages/sympy/polys/polytools.py", line 98, in new
return cls._from_expr(rep, opt)
File "/root/.local/lib/python2.7/site-packages/sympy/polys/polytools.py", line 209, in _from_expr
return cls._from_dict(rep, opt)
File "/root/.local/lib/python2.7/site-packages/sympy/polys/polytools.py", line 151, in _from_dict
domain, rep = construct_domain(rep, opt=opt)
File "/root/.local/lib/python2.7/site-packages/sympy/polys/constructor.py", line 217, in construct_domain
result = _construct_composite(coeffs, opt)
File "/root/.local/lib/python2.7/site-packages/sympy/polys/constructor.py", line 169, in _construct_composite
numer[monom] = ground.from_sympy(coeff)
File "/root/.local/lib/python2.7/site-packages/sympy/polys/domains/pythonrationalfield.py", line 34, in from_sympy
raise CoercionFailed("expected Rational object, got %s" % a)
sympy.polys.polyerrors.CoercionFailed: expected Rational object, got -oo
这个问题是什么意思,该如何解决?@小鱼 嗯,已经成功导入了。现在就有一个问题,我最初拿到的代码,它里面的urdf导入的是二进制安装的moveit,而我现在导入到了源码安装的moveit并生成了对应的moveit_config功能包,那么这时如果要控制真实的机械臂,应该重写去写它对应的launch文件吧
@小鱼 谢谢大佬,源码安装的问题我自己解决了,准确来说我不是在源码安装上有问题,而是在源码安装之后不知道怎么用源码安装的moveit去控制自己机械臂的问题。后来通过别人了解到,源码安装moveit之后,需要自己再去把URDF模型导入一边,生成对应的config和launch文件,这样才能行,所以我现在又引申出了另一个问题,就是如何让导入URDF生成的launch文件,去控制真实的自己的机械臂。
@小鱼 在 源码安装moveit之后,运行自己机械臂的moveit demo出错 中说:
好久没用过moveit1了,看报错,感觉缺少了moveit_ros_move_group ,你可以尝试用 apt 安装下。
这样安装之后,还能在moveit中加入自己的路径规划算法吗
@小鱼 在 源码安装moveit之后,运行自己机械臂的moveit demo出错 中说:
源码版本可能不对
大佬,那如何下载正确版本的moveit和ompl的源码呢,能给一个建议的版本吗,我怀疑是我在git克隆代码的时候,没有克隆到正确版本的分支上
Moveit1安装官方文档
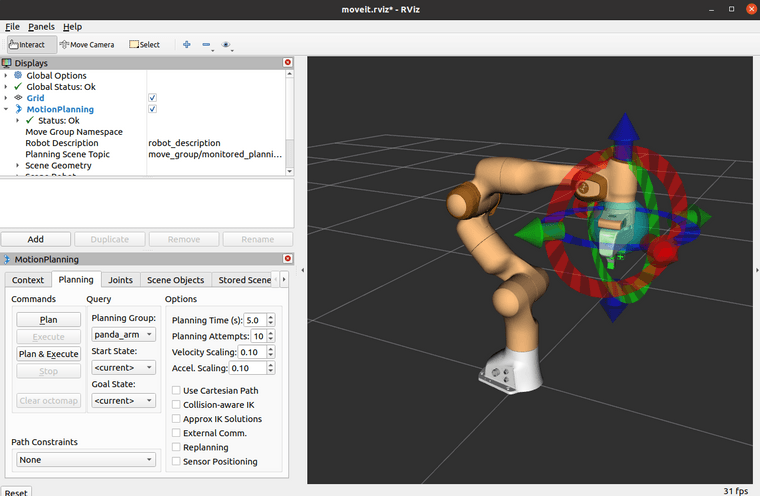
以上是moveit源码安装的官方文档,我按照官方给的安装教程源码安装了moveit1,然后用官方给的panda机械臂的moveit!demo运行了下面命令:
roslaunch panda_moveit_config demo.launch
发现可以正常显示panda机械臂的模型:
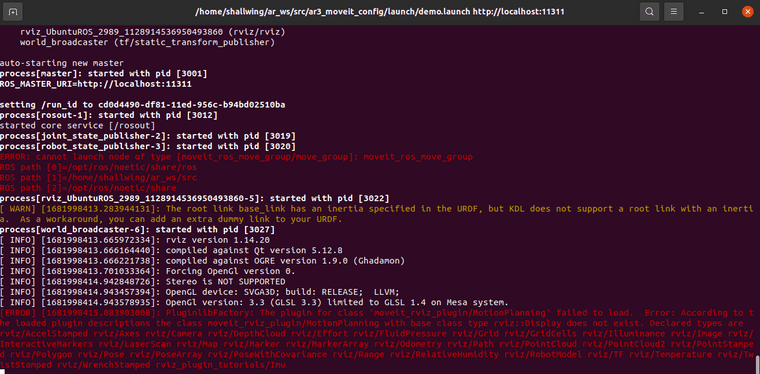
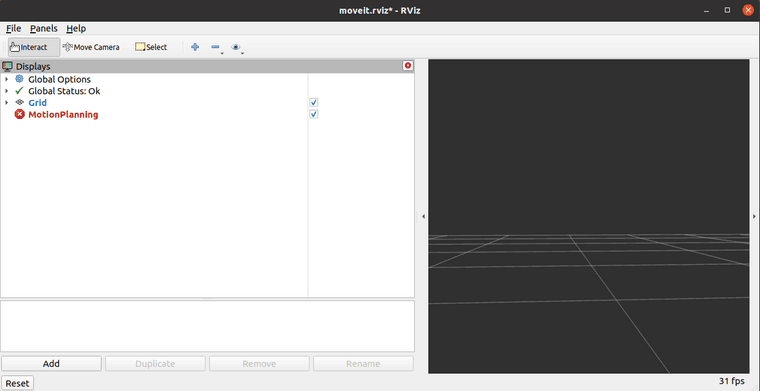
接着,我直接用了我机械臂的moveit中的demo去运行,结果报了这个错误:
还有rviz中显示是这样的:
我的机械臂的ROS代码在下面的链接中:
源行ar4机械臂ROS源码(兼容ar3与ar4)
运行ar4 moveit demo的命令是这个:
roslaunch ar3_moveit_config demo.launch
在使用二进制安装的moveit时,ar4的moveit!demo是可以正常运行的,但是源码安装的情况下却是这样,我很不解,请求各位大佬帮助,谢谢