@小鱼 我看你设置助手出了教程,这个问题有遇到过吗
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
LittleMING 发布的最新帖子
-
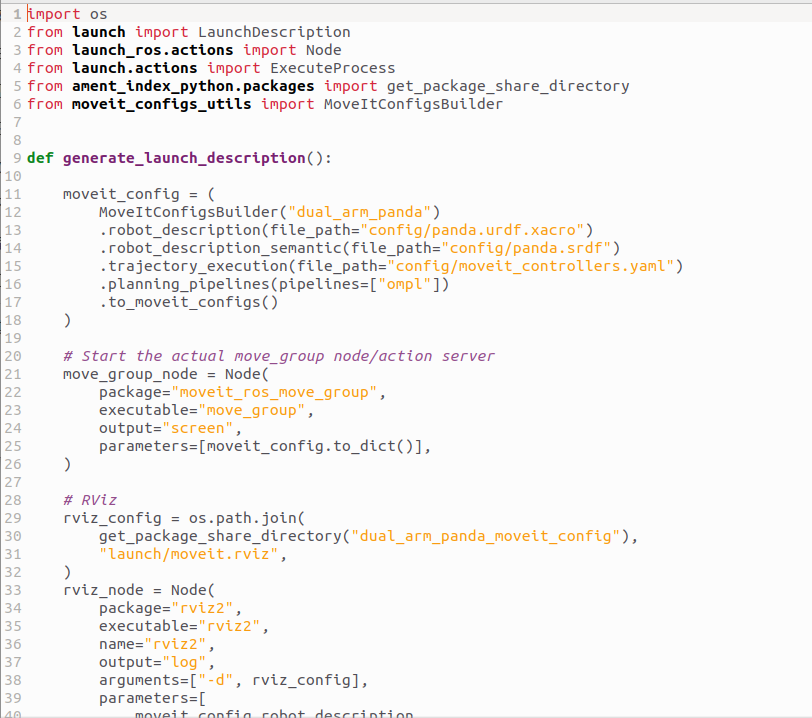
ros2 humble moveit setup assistant生成demo.launch.py不完整发布在 动手学ROS2
我通过设置助手生成的demo.launch.py只有短短几行,而且生成的launch包里其他文件都是像这个一样短短几行

别人生成的都是这样的
导致我最后运行demo.launch.py时候会出现以下报错
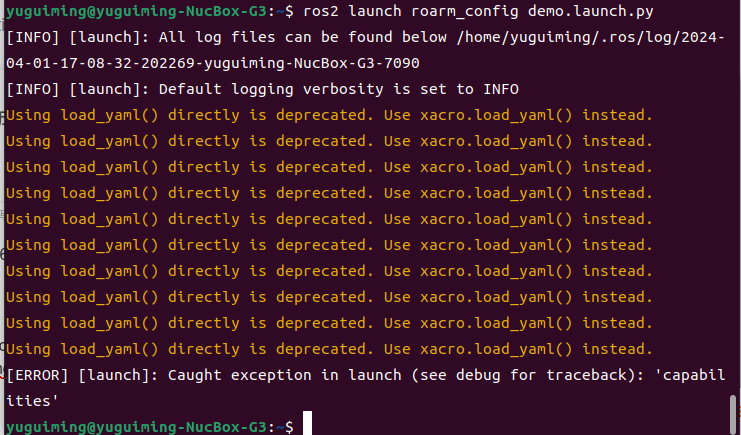
-
ROS2中,在moveit加入自己的机械臂发布在 机械臂运动规划
在ubuntu22.04 humble中,我看到了有完整的点到点运动控制代码以及笛卡尔空间坐标系移动代码,但我看到moveit设置助手仍是noetic的,那问题来了,我如果在ros1上配置好,要怎样才能在ros2上运行我配置好的那一些文件,例如rviz_demo以及gazebo_demo那些文件呢
-
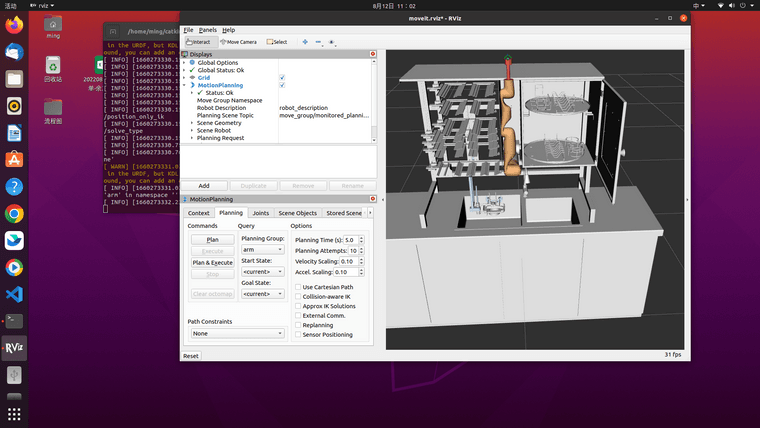
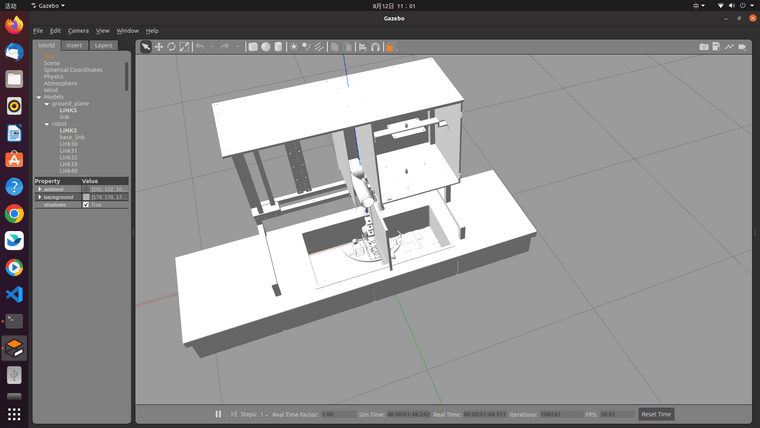
moveit是否存在自动避障失败情况发布在 机械臂运动规划
事情是这样的,我导入了一个带有其他可旋转结构的机械臂模型
如下:

机械臂拉门的时候避障就很成功
但一旦到了左边层架那里,避障就失败了
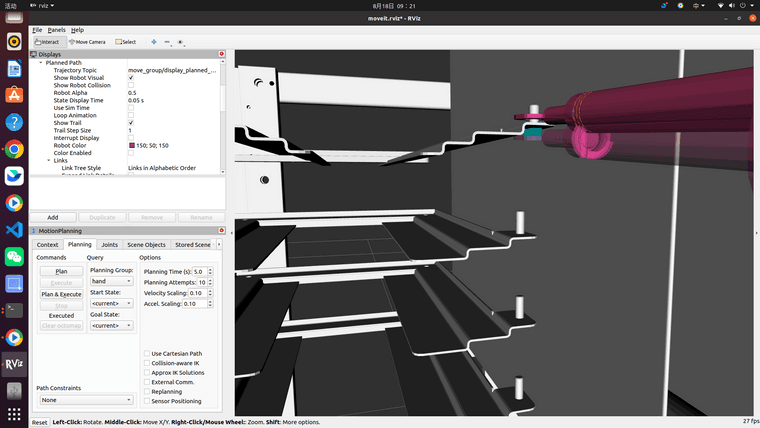
可从蓝绿色轨迹线看出直接穿过了模型,但奇怪的是我手动拖动却会显示碰撞
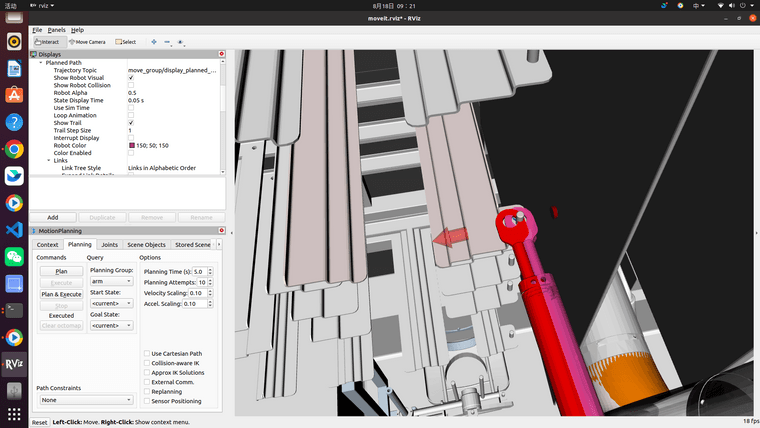
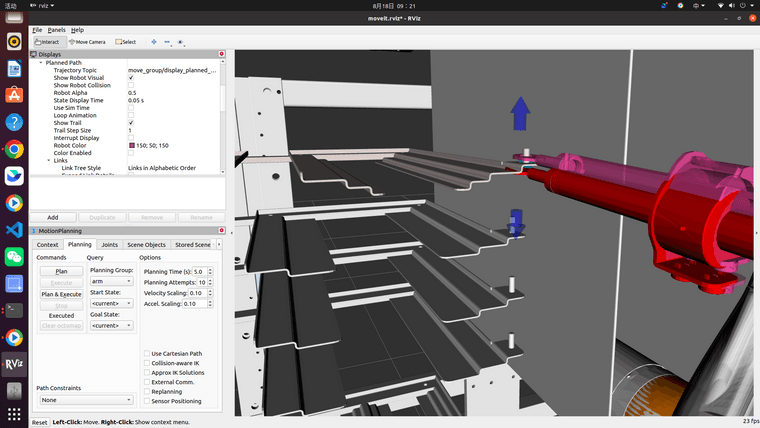
这就把握难住了,有没有方法可以解决这个问题 -
机械臂逆运动学问题发布在 机械臂运动规划
你好。我想请问一下,假设用七轴做机械臂逆运动学时,ROS里可不可以限制某些关节的转动。例如,根据给定的笛卡尔坐标让机械臂做运动,但我要让第三,第四轴不转动(前提是假设有解可满足需求),请问ROS里有没有这方面的API或功能?
-
RE: gazebo和rviz联合仿真时模型位置不对发布在 机械臂运动规划
@小鱼 这个不是因为重力掉落,我是把父辈都连接到base_link上了,所有零件都渠道坐标原点了,我希望机械臂能拖动一个能滑动的关节,那个零件我就设置成prismatic,自然就不能设置成fix了