@小鱼 确实是颜色标签的问题。。。我在移植的时候忘记把描述颜色的xacro文件移植过来了。。感谢
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
mu 发布的最佳帖子
-
RE: ros2 foxy moveit2,在rviz中加载模型变黑,gazebo显示正常,且能正常使用发布在 综合问题
mu 发布的最新帖子
-
如何修改gazebo加载机械臂时的初始姿态?发布在 综合问题
不希望机械臂是以零点姿态加载到gazebo中,可以在不修改urdf中的origin参数的前提下,在gazebo加载机械臂模型时给定一个初始关节角度吗?
-
RE: 无法通过ros2 node list/topic list/service list查看当前运行的节点、话题和服务等信息发布在 ROS2
@小鱼 我发现进入sudo su运行程序,只能在超级用户下才能查看到当前运行的节点话题等,在普通用户的终端下根本不会显示,这是什么原因?
-
RE: 无法通过ros2 node list/topic list/service list查看当前运行的节点、话题和服务等信息发布在 ROS2
很奇怪的现象,我把ros2的daemon停掉之后就能正常显示了。。。
鱼总能不能解释一下这是啥情况。。 -
无法通过ros2 node list/topic list/service list查看当前运行的节点、话题和服务等信息发布在 ROS2
ubuntu20.04+foxy
能够正常运行各种示例,但是通过ros2 node list/topic list/service list无法查看当前的节点、话题和服务
-
RE: ros2 foxy move_group->getCurrentJointValues()获取失败发布在 综合问题
@小鱼 是的,启动节点在构造中打印一切正常,启动完成后我调用服务,它在服务回调中就无法获取了。。。
-
RE: ros2 foxy move_group->getCurrentJointValues()获取失败发布在 综合问题
@小鱼 我打印了,在启动构造的时候它是可以正确的获取到,构造完后调用服务的时候就无法获取到了
这里最后可以正常获取,当我调用home_teleop_server_时就无法获取了。。。
ElfinTeleopAPI::ElfinTeleopAPI(const rclcpp::Node::SharedPtr& node,moveit::planning_interface::MoveGroupInterface *group, std::string action_name, planning_scene_monitor::PlanningSceneMonitorPtr planning_scene_monitor): group_(group),planning_scene_monitor_(planning_scene_monitor), teleop_nh_(node) { home_teleop_server_=teleop_nh_->create_service<std_srvs::srv::SetBool>("home_teleop", std::bind(&ElfinTeleopAPI::homeTeleop_cb,this,std::placeholders::_1,std::placeholders::_2)); end_link_=group_->getEndEffectorLink(); reference_link_=group_->getPlanningFrame(); default_tip_link_=group_->getEndEffectorLink(); root_link_=group_->getPlanningFrame(); std::cout<<"----------teleop_api-----------"<<std::endl; std::cout<<end_link_<<reference_link_<<default_tip_link_<<root_link_<<std::endl; std::cout<<group_->getCurrentJointValues().size()<<std::endl; std::cout<<group_->getCurrentPose().pose.position.x<<std::endl; std::cout<<"---------------"<<std::endl; }bool ElfinTeleopAPI::homeTeleop_cb(std_srvs::srv::SetBool::Request::SharedPtr req, std_srvs::srv::SetBool::Response::SharedPtr resp) { moveit::core::RobotStatePtr current_state=group_->getCurrentState(); std::cout<<"----home_callback-------"<<std::endl; std::vector<double> position_current=group_->getCurrentJointValues(); std::cout<<position_current.size()<<goal_.trajectory.joint_names.size()<<std::endl; std::cout<<group_->getCurrentPose().pose.position.x<<std::endl; ........ } -
ros2 foxy move_group->getCurrentJointValues()获取失败发布在 综合问题
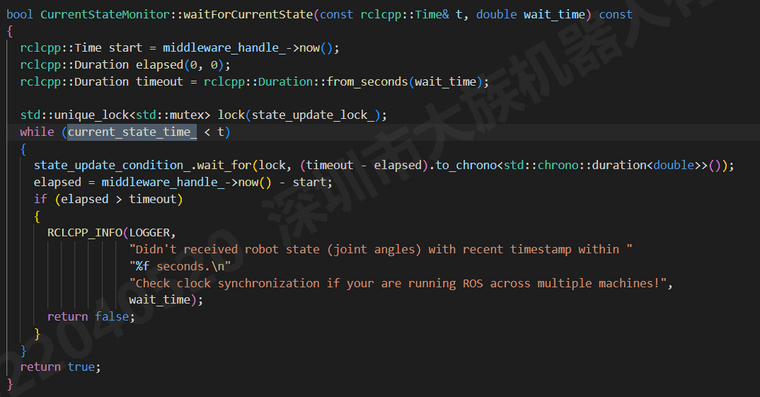
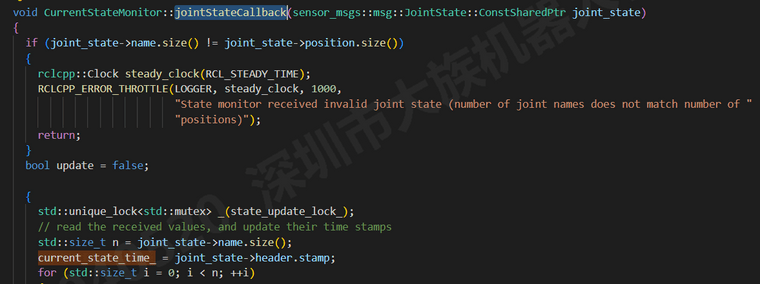
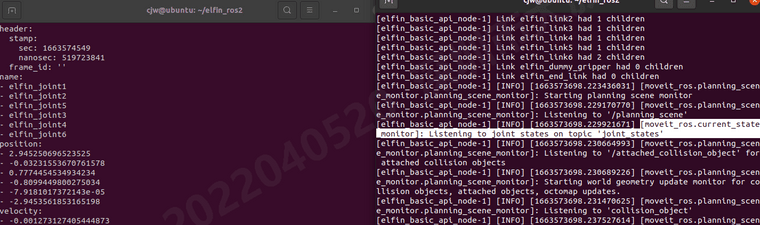
我查看过源码,该错误是从CurrentStateMonitor::waitForCurrentState发出,真正原因是current_state_time_没有更新,而current_state_time_是从joint_states回调中更新,但我的joint_states是有在更新的

-
ros2 foxy编译服务失败,编译时全部服务都报同样的错误,尝试过很多写法结果都一样发布在 ROS2
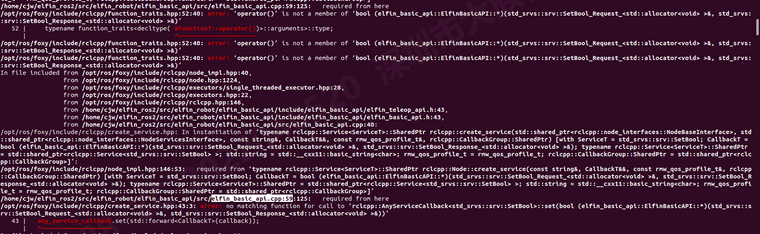
定义: bool enableRobot_cb(const std_srvs::srv::SetBool::Request::SharedPtr req, const std_srvs::srv::SetBool::Response::SharedPtr resp); rclcpp::Service<std_srvs::srv::SetBool>::SharedPtr enable_robot_server_; 实现: enable_robot_server_=local_nh_->create_service<std_srvs::srv::SetBool>("enable_robot", std::bind(&ElfinBasicAPI::enableRobot_cb, this, _1,_2), rmw_qos_profile_services_default,callback_group_service_); bool ElfinBasicAPI::enableRobot_cb(const std_srvs::srv::SetBool::Request::SharedPtr req, const std_srvs::srv::SetBool::Response::SharedPtr resp) { ....... } -
RE: ros2 foxy moveit2,在rviz中加载模型变黑,gazebo显示正常,且能正常使用发布在 综合问题
@小鱼 确实是颜色标签的问题。。。我在移植的时候忘记把描述颜色的xacro文件移植过来了。。感谢
-
RE: ros2 foxy moveit2,在rviz中加载模型变黑,gazebo显示正常,且能正常使用发布在 综合问题
@小鱼 这是关节一的urdf
<link name="elfin_link1"> <inertial> <origin xyz="-0.021815 -1.1609E-05 0.095394" rpy="0 0 0" /> <mass value="${2.576772*density}"/> <inertia ixx="${0.01298966*density}" ixy="${0.00287966*density}" ixz="${-0.000001*density}" iyy="${0.00721115*density}" iyz="${-0.00000052*density}" izz="${0.01532713*density}"/> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="file://$(find elfin_description)/meshes/elfin5/elfin_link1.STL" /> </geometry> <material name="metal"/> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="file://$(find elfin_description)/meshes/elfin5/elfin_link1.STL" /> </geometry> </collision> </link> <joint name="elfin_joint1" type="revolute"> <origin xyz="0 0 0.0735" rpy="0 0 0" /> <parent link="elfin_base" /> <child link="elfin_link1" /> <axis xyz="0 0 1" /> <limit lower="-3.14" upper="3.14" effort="200" velocity="1.57" /> </joint>