@小鱼 非常感谢鱼哥百忙之中的详细解答,我忙完最近面试进行一下测试
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
RongJC 发布的最佳帖子
RongJC 发布的最新帖子
-
moveit修改官方包-两个规划组发布在 机械臂运动规划
如果我要修改机械臂官方包,比如加个末端执行器或者加个升降关节,用助手生成新包,并在更改了xacro等模型后,如果更改controllers.yaml等文件,需要改动哪些么?请问有相关方面的学习教程吗
-
ROS2在服务和话题通讯时,点云和图像等信息传递时的通讯延迟发布在 ROS2
点云和1080P以上的图片通常占用很大内存,相机在一个节点发送点云和图像内容,但是在检测节点会出现很大延迟,不同节点之间如何解决延迟问题呢?还是把图像获取和检测节点写在一起,对时间不敏感的部分进行解耦和,但是这样还是会把检测写的很臃肿,请问大家如何解决?
-
RE: 使用虚拟环境python中不兼容的问题发布在 综合问题
import rospy, sys
PATH = "/usr/lib/python3/dist-packages/"
if str(PATH) not in sys.path:
sys.path.append(str(PATH)) -
使用虚拟环境python中不兼容的问题发布在 综合问题
在使用 miniconda 创建的虚拟环境后(深度学习需要),遇到了No module named PyKDL的问题,于是网上找到了解决方法
在bashrc中写入export PYTHONPATH="${PYTHONPATH}:/usr/lib/python3/dist-packages/"
但是,后来发现使用open3d报错了,原因应该是使用了系统的numpy版本太低不兼容
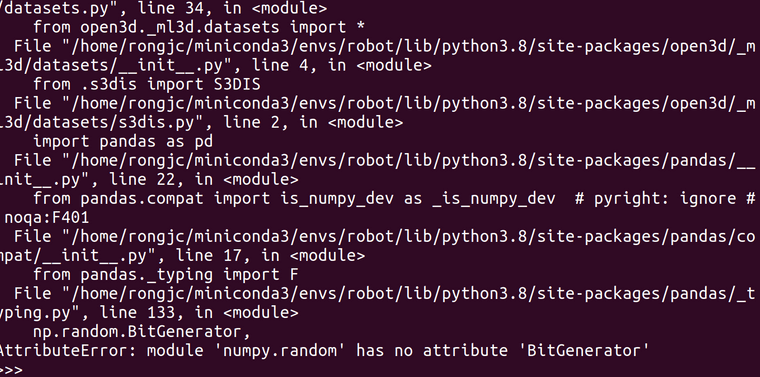
想咨询下有没有好的解决方案。
-
RE: 手眼标定矩阵的精度问题发布在 手眼标定
Q1:一般来说,在我们自己做手眼标定的时候是不需要复位的,机械臂实时获得最后一个关节法兰位姿。复位再采集,手眼矩阵方差小,会不会是机械臂本身的定位精度比较低,需要复位矫正?
Q2:xyz是平移量,相机坐标系相对于末端法兰坐标系的相对位置变换。 -
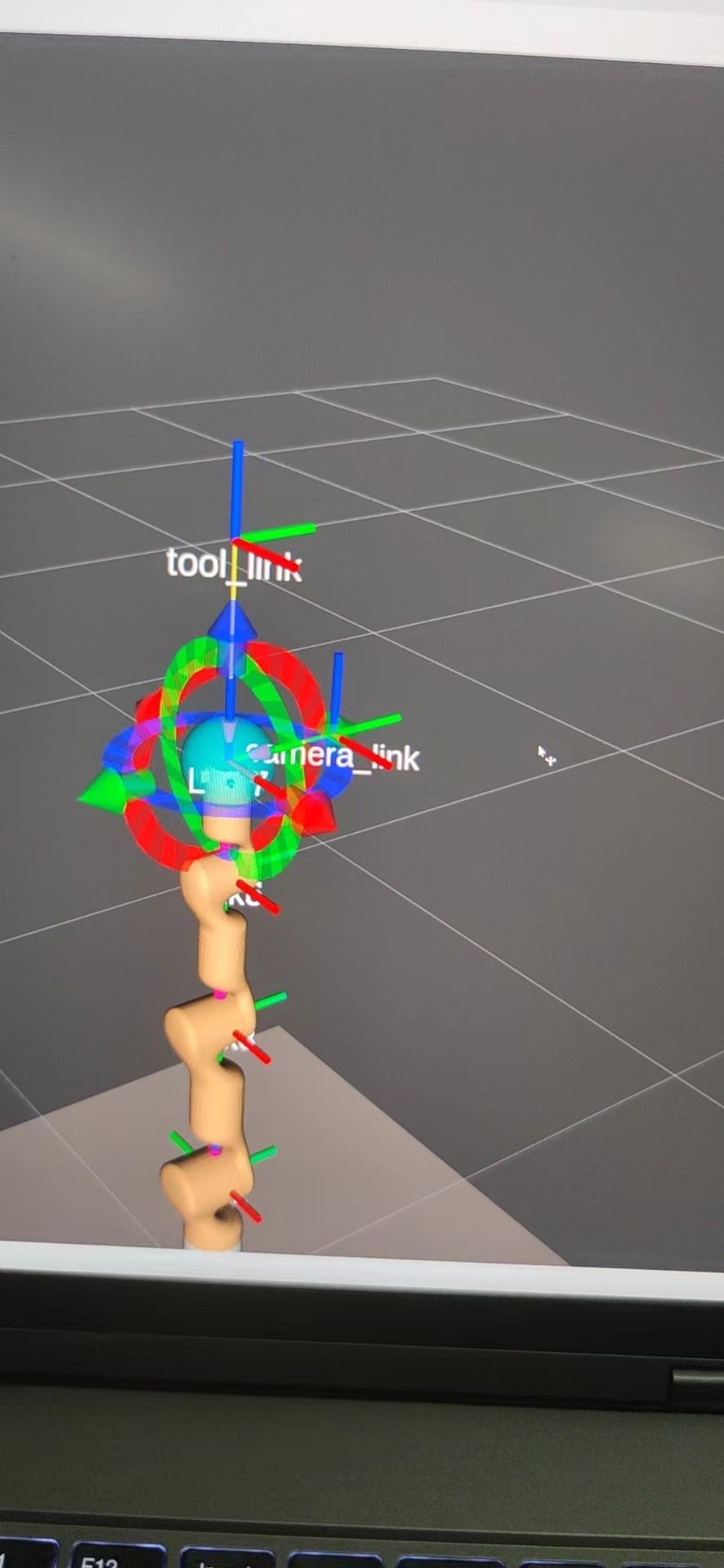
moveit轨迹规划时怎么使另外添加的TF坐标系到达目标位置?发布在 机械臂运动规划
如果想自己广播的tool_link触碰物体,而不是最后一个末端法兰触碰物体,请问可以用哪些方法?
相当于在moveit配置时,没有描述机械臂末端。还有,是否只能有一个末端?比如我末端有2个位置可以到达目标位置。