@1306055164 同问
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
Z
zyg_sddy 发布的最新帖子
-
moveit控制真实机械臂报错发布在 机械臂运动规划
错误信息1:
[ WARN] [1676456964.123995048]: Waiting for arm_controller/follow_joint_trajectory to come up
[ INFO] [1676456967.948962794]: Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
[ INFO] [1676456967.949335648]: Constructing new MoveGroup connection for group 'arm' in namespace ''
[ WARN] [1676456970.124373334]: Waiting for arm_controller/follow_joint_trajectory to come up
[ERROR] [1676456976.124754349]: Action client not connected: arm_controller/follow_joint_trajectory错误信息2:
[ERROR] [1676456988.700318365]: Unable to identify any set of controllers that can actuate the specified joints: [ joint1 joint2 joint2claw_r joint3 joint4 joint5 ]
[ERROR] [1676456988.700346910]: Known controllers and their joints:[ERROR] [1676456988.700380093]: Apparently trajectory initialization failed
下面是错误图片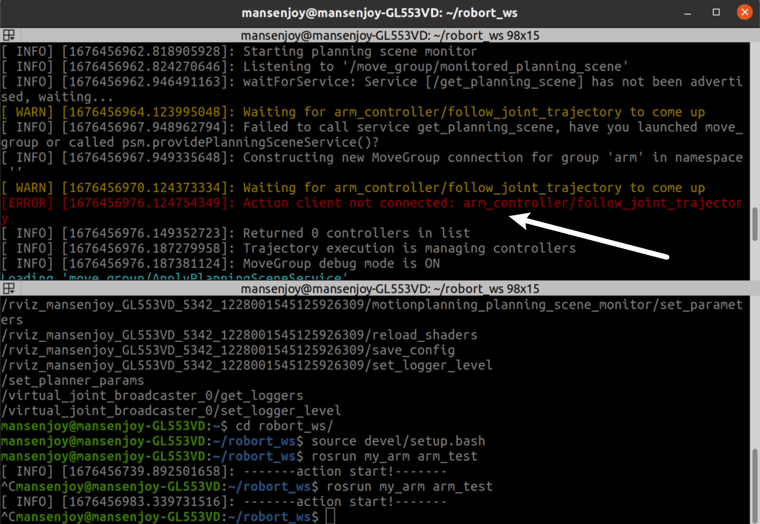
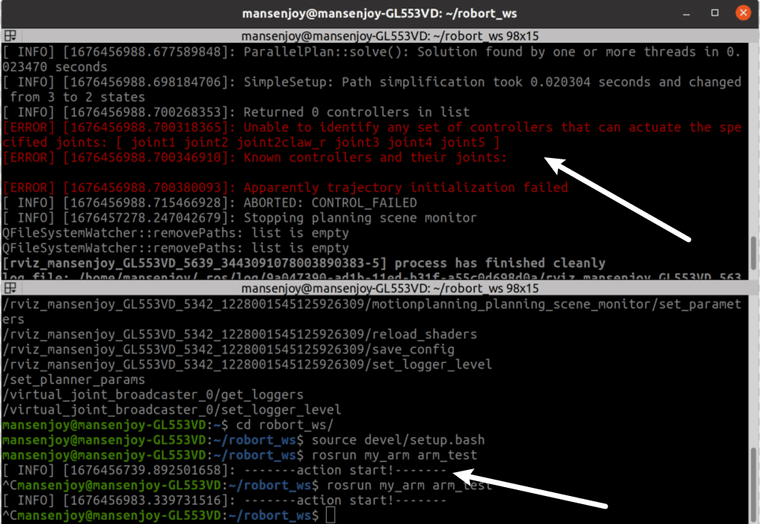
求教解决感谢 -
RE: 编译时colcon build 报stderr错误发布在 ROS2
@小鱼 我看了,底下是一个警告,警告我在服务的回调函数里定义了request但是没有调用,然后我调用了以后上面的stderr错误也没了,我又尝试了定义别的变量不引用,也会报这个错误。
-
编译时colcon build 报stderr错误发布在 ROS2
这个是我编写的服务端代码
#include "rclcpp/rclcpp.hpp" #include "underwater_interfaces/srv/jointvalue.hpp" class Joint_value: public rclcpp::Node { private: rclcpp::Service<underwater_interfaces::srv::Jointvalue>::SharedPtr joint_value_calculate; void Joint_calculate01(const underwater_interfaces::srv::Jointvalue::Request::SharedPtr request, const underwater_interfaces::srv::Jointvalue::Response::SharedPtr response) { RCLCPP_INFO(this->get_logger(),"Joint calcuater started!"); response->joint0=77.66; response->joint1=77.66; response->joint2=77.66; response->joint3=77.66; } public: Joint_value(std::string name): Node (name) { RCLCPP_INFO(this->get_logger(),"Joint_value service is started!"); joint_value_calculate = this->create_service<underwater_interfaces::srv::Jointvalue>("joint_value_calculater", std::bind(&Joint_value::Joint_calculate01,this, std::placeholders::_1,std::placeholders::_2)); } }; int main(int argc ,char **argv) { rclcpp::init(argc,argv); auto node=std::make_shared<rclcpp::Node>("joint_value_calculate"); RCLCPP_INFO(node->get_logger(),"joint_value_calculate started!"); rclcpp::spin(node); rclcpp::shutdown(); return 0; }报错如下:
stderr: robot_joint /home/mansenjoy/robot/src/robot_joint/src/robot_joint.cpp: In member function ‘void Joint_value::Joint_calculate01(underwater_interfaces::srv::Jointvalue_Request_<std::allocator<void> >::SharedPtr, underwater_interfaces::srv::Jointvalue_Response_<std::allocator<void> >::SharedPtr)’:自定义的接口
float32 x float32 y float32 z --- float32 joint0 float32 joint1 float32 joint2 float32 joint3 -
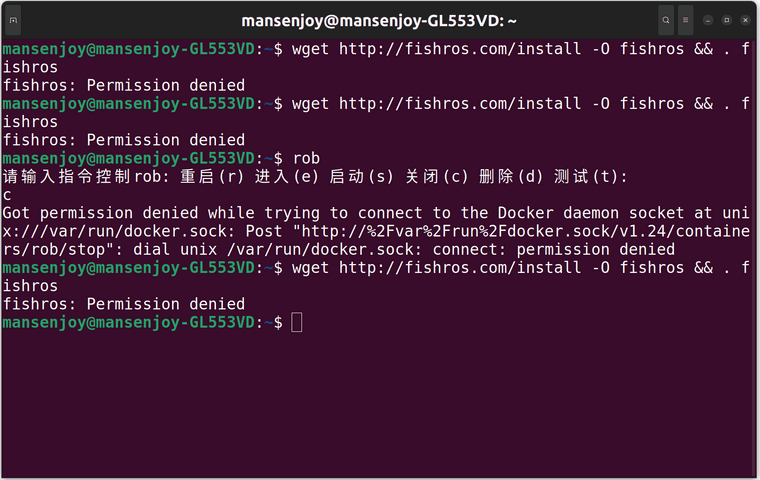
RE: 拒绝访问发布在 一键安装
mansenjoy@mansenjoy-GL553VD:~$ wget http://fishros.com/install -O fishros && . fishros
fishros: Permission denied