现在使用的单线激光雷达点云质量比较差,有比较严重的拖尾现象,想请教一下有什么方法可以改善一下这个现象?
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
小丑汪 发布的帖子
-
跑同一个bag,两个算法算法轨迹时间戳不一样,发布在 综合问题
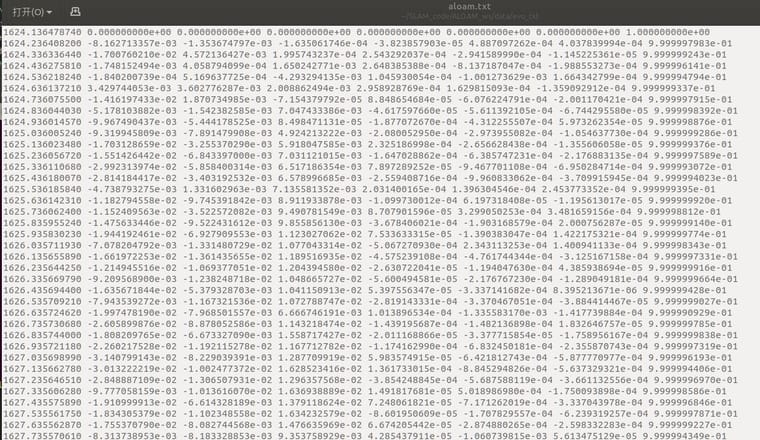
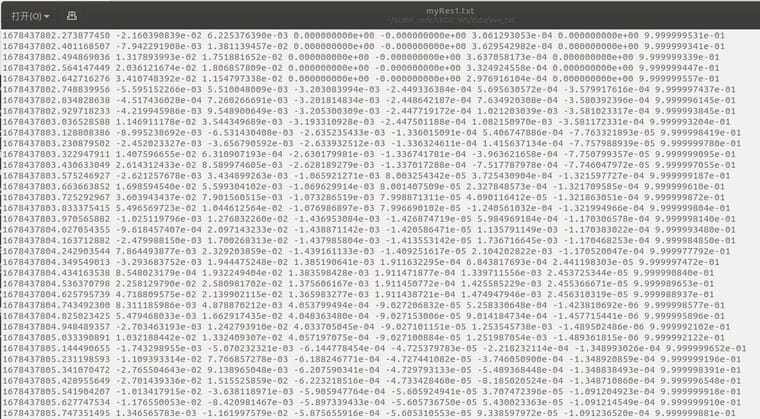
之前自己用ouster激光雷达录了一个包,分别跑了aloam和legoloam,然后保存了两个算法的轨迹,两个算法的轨迹时间戳不一样,但是我搭建了一个仿真环境,录了velodyne的包,跑算法时间戳一样.想用evo对比一下轨迹,但是时间戳不一样.
ouster录的包跑ALOAM的时间戳如下:
ouster录的包跑legoLOAM轨迹时间戳如下
包播放的时间戳

-
请教一下大家,有人用过mpc-tools-casadi吗?发布在 综合问题
我从github上面下载了一个程序,按照readme安装了MPCTools,然后运行之后出现说mpctools里面没有'getCasadiFunc'这个函数,我按mpctools安装要求重新装了也不行,想请教一下大家怎么解决.
Traceback (most recent call last): File "/home/github/articulated_ws/src/articulated_tractor_trailer_paper/articulated_tractor_trailer_trajectory/src/articulated_tractor_trailer_trajectory.py", line 247, in <module> start() File "/home/github/articulated_ws/src/articulated_tractor_trailer_paper/articulated_tractor_trailer_trajectory/src/articulated_tractor_trailer_trajectory.py", line 127, in start (controller, Nt, Delta) = export_articulated_tractor_trailer_model() File "/home/github/articulated_ws/src/articulated_tractor_trailer_paper/articulated_tractor_trailer_trajectory/src/export_articulated_tractor_trailer_model.py", line 59, in export_articulated_tractor_trailer_model ode_casadi = mpc.getCasadiFunc(ode_control_trailer, [Nx, Nu], ["x", "u"], funcname="f") AttributeError: module 'mpctools' has no attribute 'getCasadiFunc'[articulated_tractor_trailer_trajectory-5] process has died [pid 11460, exit code 1, cmd /home/github/articulated_ws/src/articulated_tractor_trailer_paper/articulated_tractor_trailer_trajectory/src/articulated_tractor_trailer_trajectory.py __name:=articulated_tractor_trailer_trajectory __log:=/home/.ros/log/3108ace8-6d2a-11ed-8666-d4548b799fd2/articulated_tractor_trailer_trajectory-5.log]. log file: /home/.ros/log/3108ace8-6d2a-11ed-8666-d4548b799fd2/articulated_tractor_trailer_trajectory-5*.log -
gazebo仿真的时候转向怎么控制的顺滑发布在 综合问题
我在进行铲车仿真的时候,控制转向角的时候模型反应比较慢,置0的时候不能回到0位,转向运动的时候模型发生抖动。各位大佬看看是什么原因
<!-- motors and transmissions for the two rear wheels --> <transmission name="tran1"> <type>transmission_interface/SimpleTransmission</type> <joint name="back_right_wheel2base_link"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor1"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <transmission name="tran2"> <type>transmission_interface/SimpleTransmission</type> <joint name="back_left_wheel2base_link"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor2"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <!-- EPS and transmissions for the front steering --> <transmission name="tran3"> <type>transmission_interface/SimpleTransmission</type> <joint name="steering_hinge2base_link"> <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface> </joint> <actuator name="eps"> <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <transmission name="tran4"> <type>transmission_interface/SimpleTransmission</type> <joint name="front_right_wheel2steering_hinge"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor3"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <transmission name="tran5"> <type>transmission_interface/SimpleTransmission</type> <joint name="front_left_wheel2steering_hinge"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor4"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <!-- Friction Parametres --> <gazebo reference="back_right_wheel"> <mu1>2.0</mu1> <mu2>2.0</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="back_left_wheel"> <mu1>2.0</mu1> <mu2>2.0</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="front_right_wheel"> <mu1>2.0</mu1> <mu2>2.0</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="front_left_wheel"> <mu1>2.0</mu1> <mu2>2.0</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo>控制的ymal文件
xul307a: # controls the rear two tires based on individual motors # Publish all joint states ----------------------------------- joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50 back_right_velocity_controller: type: velocity_controllers/JointVelocityController joint: back_right_wheel2base_link pid: {p: 100.0, i: 0.01, d: 10.0} back_left_velocity_controller: type: velocity_controllers/JointVelocityController joint: back_left_wheel2base_link pid: {p: 100.0, i: 0.01, d: 10.0} steering_position_controller: type: effort_controllers/JointPositionController joint: steering_hinge2base_link pid: {p: 25000, i: 0, d: 10.0} front_right_velocity_controller: type: velocity_controllers/JointVelocityController joint: front_right_wheel2steering_hinge pid: {p: 100.0, i: 0.01, d: 10.0} front_left_velocity_controller: type: velocity_controllers/JointVelocityController joint: front_left_wheel2steering_hinge pid: {p: 100.0, i: 0.01, d: 10.0} -
使用OS0-128激光雷达跑ALOAM,怎么修改发布在 综合问题
我修改了launch文件和scanRegistration.cpp文件,没有跑成功。
<launch> <param name="scan_line" type="int" value="128" /> <!-- if 1, do mapping 10 Hz, if 2, do mapping 5 Hz. Suggest to use 1, it will adjust frequence automaticlly --> <param name="mapping_skip_frame" type="int" value="1" /> <!-- remove too closed points --> <param name="minimum_range" type="double" value="5"/> <remap from="/velodyne_points" to="/os_cloud_node/points"/> <param name="mapping_line_resolution" type="double" value="0.4"/> <param name="mapping_plane_resolution" type="double" value="0.8"/> <node pkg="aloam_velodyne" type="ascanRegistration" name="ascanRegistration" output="screen" /> <node pkg="aloam_velodyne" type="alaserOdometry" name="alaserOdometry" output="screen" /> <node pkg="aloam_velodyne" type="alaserMapping" name="alaserMapping" output="screen" /> <arg name="rviz" default="true" /> <group if="$(arg rviz)"> <node launch-prefix="nice" pkg="rviz" type="rviz" name="rviz" args="-d $(find aloam_velodyne)/rviz_cfg/aloam_velodyne.rviz" /> </group> </launch>bool halfPassed = false; int count = cloudSize; PointType point; std::vector<pcl::PointCloud<PointType>> laserCloudScans(N_SCANS); for (int i = 0; i < cloudSize; i++) { point.x = laserCloudIn.points[i].x; point.y = laserCloudIn.points[i].y; point.z = laserCloudIn.points[i].z; float angle = atan(point.z / sqrt(point.x * point.x + point.y * point.y)) * 180 / M_PI; int scanID = 0; if (N_SCANS == 16) { scanID = int((angle + 15) / 2 + 0.5); //确定每一个点的scanID,与垂直角度有关,确定这个点属于那个scan if (scanID > (N_SCANS - 1) || scanID < 0) { count--; //有效点减一 continue; } } else if (N_SCANS == 32) { scanID = int((angle + 92.0/3.0) * 3.0 / 4.0); if (scanID > (N_SCANS - 1) || scanID < 0) { count--; continue; } } else if (N_SCANS == 64) { if (angle >= -8.83) scanID = int((2 - angle) * 3.0 + 0.5); else scanID = N_SCANS / 2 + int((-8.83 - angle) * 2.0 + 0.5); // use [0 50] > 50 remove outlies if (angle > 2 || angle < -24.33 || scanID > 50 || scanID < 0) { count--; continue; } } else if (N_SCANS == 128) { scanID = int((angle + 45) / 2 + 0.5); if (scanID > (N_SCANS - 1) || scanID < 0) { count--; continue; } } else { printf("wrong scan number\n"); ROS_BREAK(); } //printf("angle %f scanID %d \n", angle, scanID); float ori = -atan2(point.y, point.x); if (!halfPassed) { if (ori < startOri - M_PI / 2) { ori += 2 * M_PI; } else if (ori > startOri + M_PI * 3 / 2) { ori -= 2 * M_PI; } if (ori - startOri > M_PI) { halfPassed = true; } } else { ori += 2 * M_PI; if (ori < endOri - M_PI * 3 / 2) { ori += 2 * M_PI; } else if (ori > endOri + M_PI / 2) { ori -= 2 * M_PI; } } float relTime = (ori - startOri) / (endOri - startOri); point.intensity = scanID + scanPeriod * relTime;// intensity字段的整数部分存放scanID,小数部分存放归一化后的fireID laserCloudScans[scanID].push_back(point); // 将点根据scanID放到对应的子点云laserCloudScans中 }主要修改了launch文件里面的线数,和更改了话题,scanRegistration.cpp文件里面按照16线的格式增加了128线的scanID。
-
RE: rviz显示marker不能实时更新发布在 综合问题
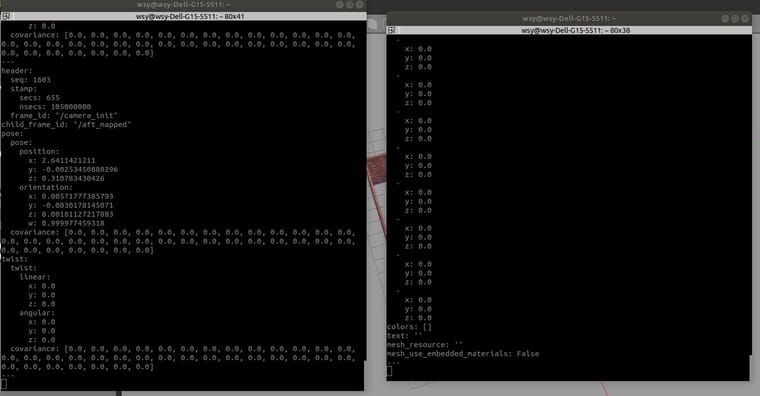
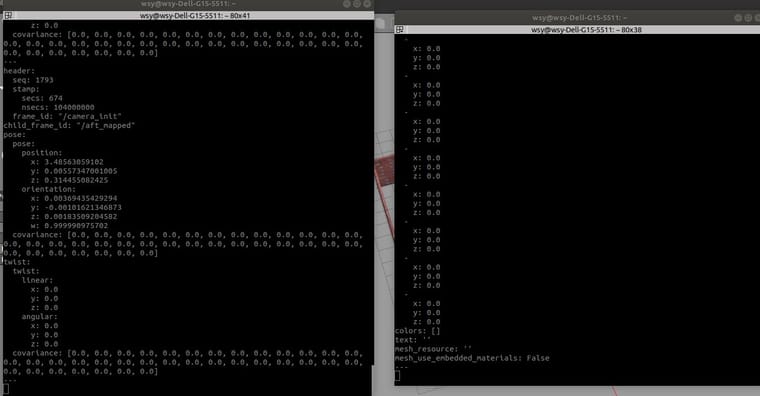
@小鱼 您好,我看了订阅的/aft_mapped_to_init和marker的话题/robot_marker,/aft_mapped_to_init数据是在更新的,/robot_marker数据一直没变。
-
rviz显示marker不能实时更新发布在 综合问题
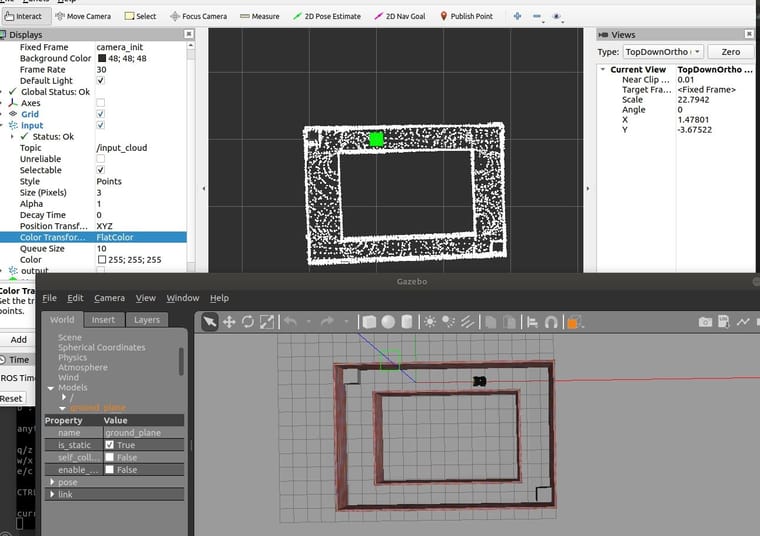
各位大佬,我想在保存的pcd地图里面用marker显示机器人的位置,我订阅了机器人的坐标形象,但是机器人移动位置变化后,marker位置不变,一直在初始位置;marker不能随机器人移动而更新,希望有了解的大佬帮忙解答一下。
#include <ros/ros.h> #include <visualization_msgs/Marker.h> #include <nav_msgs/Odometry.h> #include <geometry_msgs/Point.h> double temp_x,temp_y,temp_z; double temp_or_x,temp_or_y,temp_or_z,temp_or_w; void record_point(const nav_msgs::Odometry::ConstPtr& odom) { temp_x = odom->pose.pose.position.x; temp_y = odom->pose.pose.position.y; temp_z = odom->pose.pose.position.z; temp_or_w = odom->pose.pose.orientation.w; temp_or_x = odom->pose.pose.orientation.x; temp_or_y = odom->pose.pose.orientation.y; temp_or_z = odom->pose.pose.orientation.z; } int main( int argc, char** argv ) { ros::init(argc, argv, "points_marker"); ros::NodeHandle n; ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("/robot_marker", 10); ros::Subscriber odom_pose = n.subscribe<nav_msgs::Odometry>("/aft_mapped_to_init",100,record_point); visualization_msgs::Marker points_marker; ros::Rate r(30); while (ros::ok()) { points_marker.header.frame_id ="/camera_init"; points_marker.header.stamp =ros::Time::now(); points_marker.ns ="points_marker"; points_marker.action =visualization_msgs::Marker::ADD; points_marker.id = 0; points_marker.type = visualization_msgs::Marker::POINTS; geometry_msgs::Point obj; obj.x = temp_x; obj.y = temp_y; obj.z = temp_z; points_marker.pose.orientation.w = 1; // points_marker markers use x and y scale for width/height respectively points_marker.scale.x = 1; points_marker.scale.y = 1; points_marker.scale.z = 1; // points_marker are green points_marker.color.r = 0.0f; points_marker.color.g = 1.0f; points_marker.color.b = 0.0f; points_marker.color.a = 1.0f; points_marker.points.push_back(obj); points_marker.lifetime = ros::Duration(0.1); // 生命周期 marker_pub.publish(points_marker); r.sleep(); } }  -
RE: 路径寻迹时,读取csv文件在rviz里面显示path失败发布在 综合问题
@小鱼 是运行launch时报错的,运行rviz是这样的。
<launch> <param name="path" value="$(find path_track)/data/path1.csv" /> <param name="velocity" value="1" /> <node pkg="path_track" type="showpath" name="showpath" output="screen"/> <!--<node pkg="path_track" type="waypoint_updater.py" name="waypoint_updater" />--> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find path_track)/rviz/showpath2.rviz" required="true" /> </launch>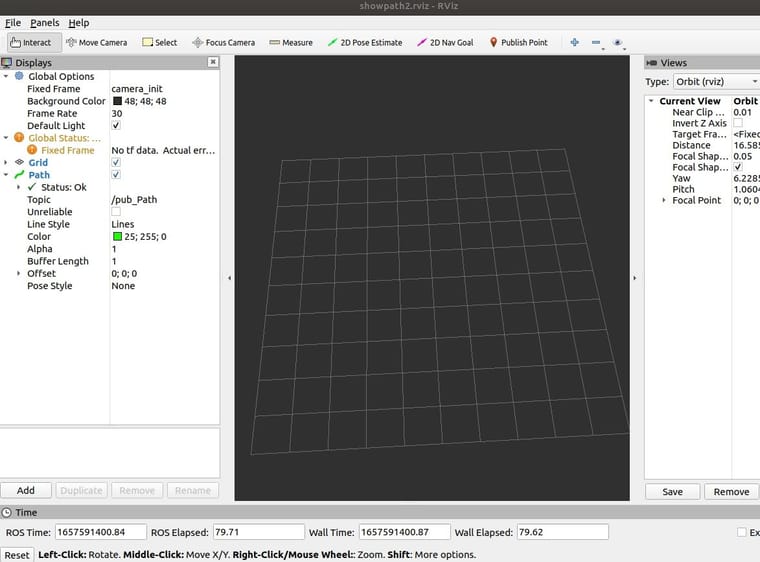
-
路径寻迹时,读取csv文件在rviz里面显示path失败发布在 综合问题
各位大佬,我想实现控制小车走一圈,记录下路径点,然后小车跟踪路径点走,在读取csv文件显示路径的时候,rviz会自己结束,下面是报错。本人基础比较差,希望各位大佬解答一下
[showpath-2] process has died [pid 14866, exit code -11, cmd /home/www/xul307a_ws/devel/lib/path_track/showpath __name:=showpath __log:=/home/www/.ros/log/ec073fd6-017e-11ed-a45a-d4548b799fd2/showpath-2.log]. log file: /home/www/.ros/log/ec073fd6-017e-11ed-a45a-d4548b799fd2/showpath-2*.log ================================================================================REQUIRED process [rviz-3] has died! process has finished cleanly log file: /home/www/.ros/log/ec073fd6-017e-11ed-a45a-d4548b799fd2/rviz-3*.log Initiating shutdown! ================================================================================这是显示csv文件的代码
#include <ros/ros.h> #include <ros/console.h> #include <nav_msgs/Path.h> #include <std_msgs/String.h> #include <geometry_msgs/Quaternion.h> #include <geometry_msgs/PoseStamped.h> #include <iostream> #include <sstream> #include <fstream> #include <string> #include "path_track/waypoint.h" #include "path_track/Lane.h" using namespace std; string file_path ; vector<string> vp; int velocity; void readfile(const std::string path , vector<string> &pathdata) { std::ifstream infile; infile.open(path.c_str(),ios::in); while (!infile.eof()) { string linestr; getline(infile,linestr); if (!linestr.empty()) { pathdata.push_back(linestr); } } infile.close(); } int main(int argc, char *argv[]) { setlocale(LC_ALL, ""); ros::init(argc,argv,"showpath"); ros::NodeHandle nh; ros::param::get("/path",file_path); ros::param::get("/velocity",velocity); readfile(file_path, vp); ros::Publisher pub_Path = nh.advertise<nav_msgs::Path>("/pub_Path", 2000); ros::Publisher pub_waypoints = nh.advertise<path_track::Lane>("/base_waypoint", 2000); nav_msgs::Path path; geometry_msgs::PoseStamped pose; path_track::waypoint waypoints; path_track::Lane lane; path.header.frame_id = "camera_init"; path.header.stamp = ros::Time::now(); lane.header.frame_id = "camera_init"; lane.header.stamp = ros::Time::now(); waypoints.pose.header.frame_id = "camera_init"; waypoints.pose.header.stamp = ros::Time::now(); int i = 0; int data_size = vp.size(); ros::Rate r(10); while (ros::ok()) { pose.header.frame_id = "camera_init"; pose.header.stamp = ros::Time::now(); string data[7]; istringstream tmp(vp[i]); tmp>>data[0]>>data[1]>>data[2]>>data[3]>>data[4]>>data[5]>>data[6]; pose.pose.position.x = (data[0] == "" ? 0 : stod(data[0].c_str())); pose.pose.position.y = (data[1] == "" ? 0 : stod(data[1].c_str())); pose.pose.position.z = (data[2] == "" ? 0 : stod(data[2].c_str())); pose.pose.orientation.x = (data[3] == "" ? 0 : stod(data[3].c_str())); pose.pose.orientation.y = (data[4] == "" ? 0 : stod(data[4].c_str())); pose.pose.orientation.z = (data[5] == "" ? 0 : stod(data[5].c_str())); pose.pose.orientation.w = (data[6] == "" ? 1 : stod(data[6].c_str())); waypoints.pose.pose.position.x=stod(data[0].c_str()); waypoints.pose.pose.position.y=stod(data[1].c_str()); waypoints.pose.pose.position.z=stod(data[2].c_str()); waypoints.pose.pose.orientation.x=stod(data[3].c_str()); waypoints.pose.pose.orientation.y=stod(data[4].c_str()); waypoints.pose.pose.orientation.z=stod(data[5].c_str()); waypoints.pose.pose.orientation.w=stod(data[6].c_str()); waypoints.twist.twist.linear.x = velocity; path.poses.push_back(pose); lane.waypoints.push_back(waypoints); pub_Path.publish(path); pub_waypoints.publish(lane); i++; r.sleep(); ros::spinOnce(); } return 0; } -
gazebo仿真模型沉到地下,ros-control不能控制车运行发布在 综合问题
您好,我自己画了一个铲车的简化模型,是中间铰接转向的。在gazebo里面运行之后车的轮子沉到地下,车自己滑行偏转,怎么解决
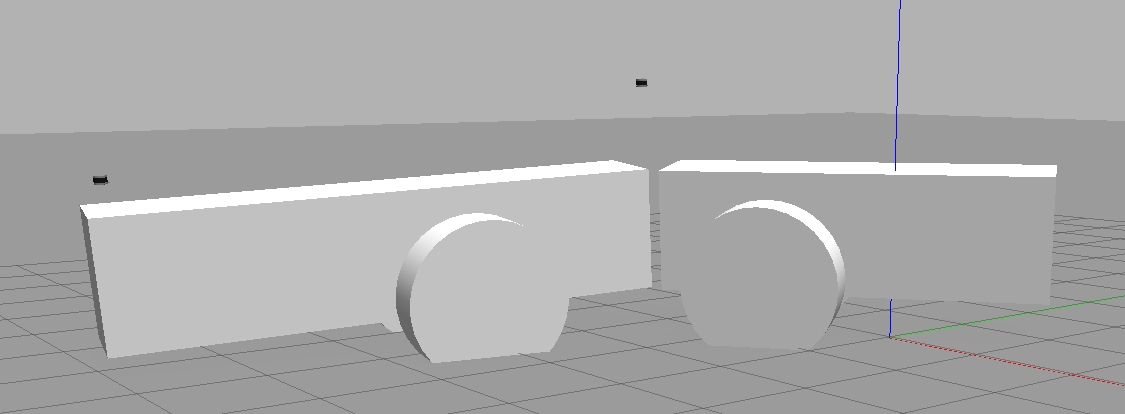
下面是我的xacro文件:
<?xml version="1.0" encoding="utf-8"?> <robot name="xul307a" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find velodyne_description)/urdf/HDL-32E.urdf.xacro"/> <xacro:include filename="$(find velodyne_description)/urdf/VLP-16.urdf.xacro"/> <link name="base_footprint"> <visual> <geometry> <sphere radius="0.001" /> </geometry> </visual> </link> <link name="base_link"> <inertial> <origin xyz="0 0 0" rpy="0 0 0" /> <mass value="4049.8" /> <!-- <inertia ixx="7926.94" ixy="0" ixz="0" iyy="7723.8" iyz="0" izz="613.68" /> --> <inertia ixx="613.68" ixy="0" ixz="0" iyy="7723.8" iyz="0" izz="7926.94" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <box size="4.72 0.78 1.1" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <box size="4.72 0.78 1.1" /> </geometry> </collision> </link> <joint name="base_link2base_footprint" type="fixed"> <parent link="base_footprint" /> <child link="base_link"/> <origin xyz="0 0 1.067" /> </joint> <link name="back_right_wheel"> <inertial> <origin xyz="0 0 0" rpy="0 0 0" /> <mass value="639.613" /> <inertia ixx="87.55" ixy="0.00" ixz="0.00" iyy="87.55" iyz="0.00" izz="156.705" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> </collision> </link> <joint name="back_right_wheel2base_link" type="continuous"> <origin xyz="0.59665 -0.7504 -0.3671" rpy="1.5708 0 0" /> <parent link="base_link" /> <child link="back_right_wheel" /> <axis xyz="0 0 -1" /> </joint> <link name="back_left_wheel"> <inertial> <origin xyz="0 0 0" rpy="0 0 0" /> <mass value="639.613" /> <inertia ixx="87.55" ixy="0.00" ixz="0.00" iyy="87.55" iyz="0.00" izz="156.705" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> </collision> </link> <joint name="back_left_wheel2base_link" type="continuous"> <origin xyz="0.59665 0.7504 -0.3671" rpy="1.5707 0 -3.1416" /> <parent link="base_link" /> <child link="back_left_wheel" /> <axis xyz="0 0 -1" /> </joint> <link name="steering_hinge_link"> <inertial> <origin xyz="2.127 0 0" rpy="0 0 0" /> <mass value="2985.8" /> <!-- <inertia ixx="3314.3" ixy="0" ixz="0" iyy="3164.6" iyz="0" izz="452.45" /> --> <inertia ixx="452.45" ixy="0" ixz="0" iyy="3314.3" iyz="0" izz="3164.6" /> </inertial> <visual> <origin xyz="2.127 0 0" rpy="0 0 0" /> <geometry> <box size="3.48 0.78 1.1" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="2.127 0 0" rpy="0 0 0" /> <geometry> <box size="3.48 0.78 1.1" /> </geometry> </collision> </link> <joint name="steering_hinge2base_link" type="revolute"> <origin xyz="2.36 0 0" rpy="0 0 0" /> <parent link="base_link" /> <child link="steering_hinge_link" /> <axis xyz="0 0 -1" /> <limit lower="-0.74" upper="0.74" effort="0" velocity="0" /> </joint> <link name="front_right_wheel"> <inertial> <origin xyz="0 0 0" rpy="0 0 0" /> <mass value="639.613" /> <inertia ixx="87.55" ixy="0.00" ixz="0.00" iyy="87.55" iyz="0.00" izz="156.705" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> </collision> </link> <joint name="front_right_wheel2steering_hinge" type="continuous"> <origin xyz="1.42 -0.75 -0.366" rpy="1.57 0 0" /> <parent link="steering_hinge_link" /> <child link="front_right_wheel" /> <axis xyz="0 0 -1" /> </joint> <link name="front_left_wheel"> <inertial> <origin xyz="0 0 0" rpy="0 0 0" /> <mass value="639.613" /> <inertia ixx="87.55" ixy="0.00" ixz="0.00" iyy="87.55" iyz="0.00" izz="156.705" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> <material name=""> <color rgba="1 1 1 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder radius="0.7" length="0.415" /> </geometry> </collision> </link> <joint name="front_left_wheel2steering_hinge" type="continuous"> <origin xyz="1.42 0.75 -0.366" rpy="1.57 0 -3.14" /> <parent link="steering_hinge_link" /> <child link="front_left_wheel" /> <axis xyz="0 0 -1" /> </joint> <VLP-16 parent="base_link" name="velodyne_front" topic="/velodyne_points_front" hz="10" samples="1801" min_range="0.8" max_range="130.0" min_angle="-${M_PI}" max_angle="${M_PI}" > <origin xyz="2.505 0 1.26" rpy="0 0 0" /> </VLP-16> <VLP-16 parent="base_link" name="velodyne_back" topic="/velodyne_points_back" hz="10" samples="1801" min_range="0.8" max_range="130.0" min_angle="-${M_PI}" max_angle="${M_PI}" > <origin xyz="-2.2056 0 0.7538" rpy="0 0 3.14" /> </VLP-16> <!-- motors and transmissions for the two rear wheels --> <transmission name="tran1"> <type>transmission_interface/SimpleTransmission</type> <joint name="back_right_wheel2base_link"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor1"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <transmission name="tran2"> <type>transmission_interface/SimpleTransmission</type> <joint name="back_left_wheel2base_link"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> </joint> <actuator name="motor2"> <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> </actuator> </transmission> <!-- EPS and transmissions for the front steering --> <transmission name="tran3"> <type>transmission_interface/SimpleTransmission</type> <joint name="steering_hinge2base_link"> <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface> </joint> <actuator name="eps"> <hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface> <mechanicalReduction>1</mechanicalReduction> <motorTorqueConstant>1000000</motorTorqueConstant> </actuator> </transmission> <!-- Friction Parametres --> <gazebo reference="back_right_wheel"> <mu1>10000000</mu1> <mu2>10000000</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="back_left_wheel"> <mu1>10000000</mu1> <mu2>10000000</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="front_right_wheel"> <mu1>10000000</mu1> <mu2>10000000</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <gazebo reference="front_left_wheel"> <mu1>10000000</mu1> <mu2>10000000</mu2> <kp>10000000</kp> <kd>1</kd> </gazebo> <!-- Gazebo Plugins --> <gazebo> <plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"> <robotNamespace>/xul307a</robotNamespace> <robotParam>robot_description</robotParam> <robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType> <!-- <legacyModeNS>true</legacyModeNS> --> </plugin> </gazebo> <gazebo> <plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so"> <jointName>back_right_wheel2base_link, back_left_wheel2base_link, steering_hinge2base_link,front_right_wheel2steering_hinge,front_left_wheel2steering_hinge</jointName> <updateRate>50.0</updateRate> <robotNamespace>/xul307a</robotNamespace> <alwaysOn>true</alwaysOn> </plugin> </gazebo> </robot>