@小鱼 好的感谢,之前理解错意思了
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
深海 发布的最新帖子
-
RE: [FishBot教程] 6. 雷达驱动及建图测试发布在 FishBot机器人
@小鱼 在用键盘控制小车移动的时候,小车可以正常运动,但是rviz里显示不出里程计
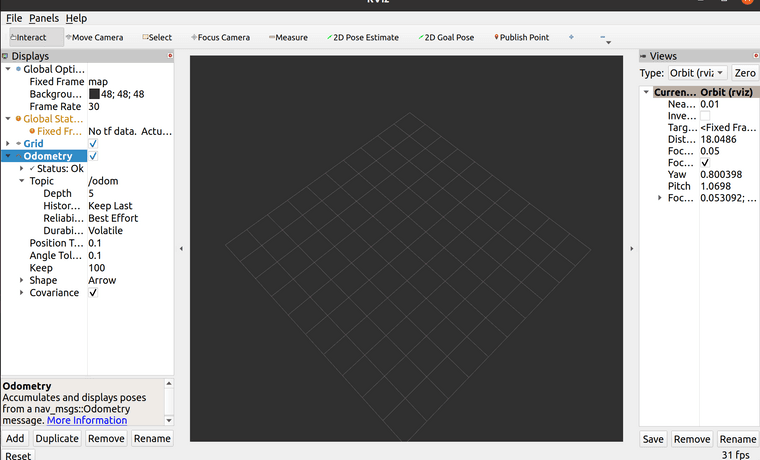
然后rviz的终端会报这个信息
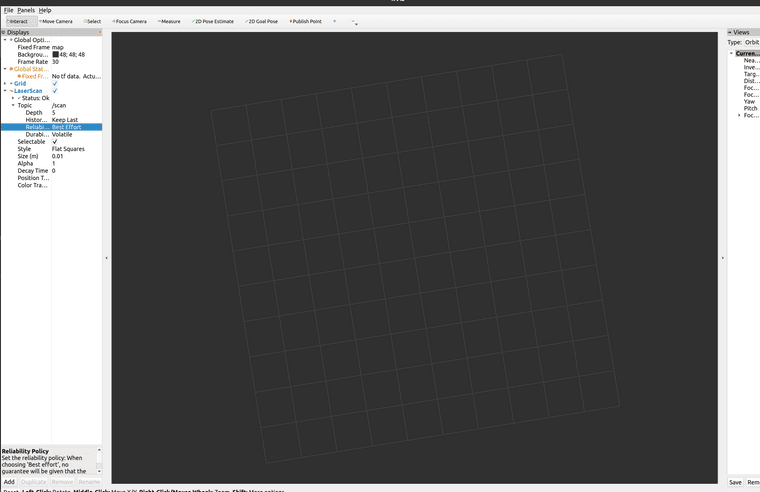
在雷达驱动的时候也有这种情况,rviz里没有显示信息
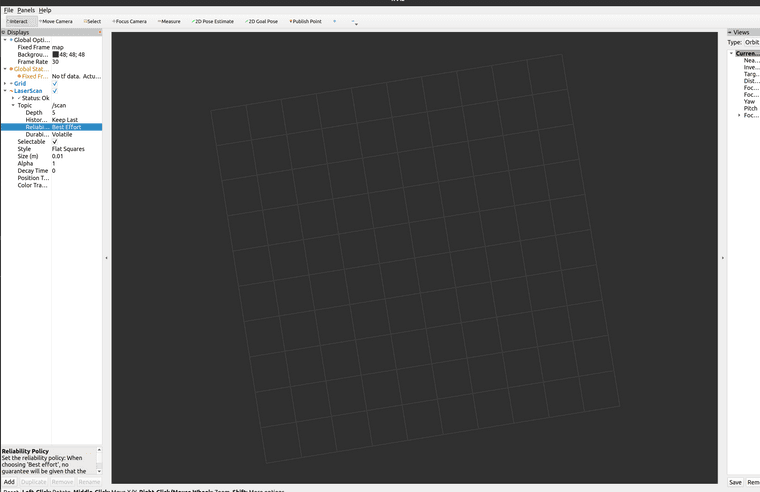
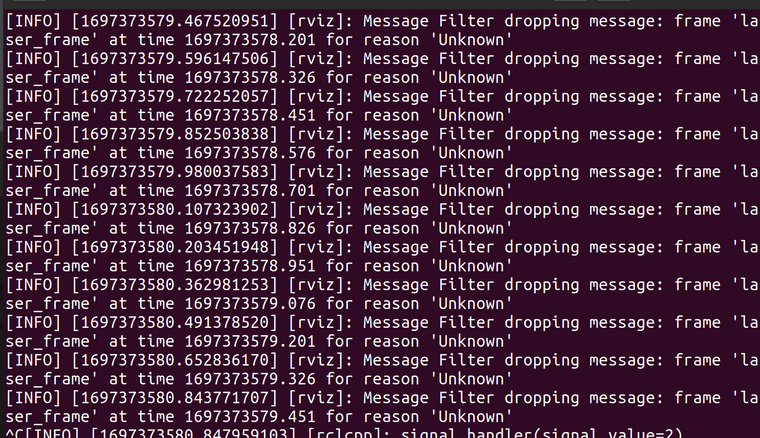
Message Filter dropping message: frame 'laser_frame' at time 4328.021 for reason unknow
这是为啥
ubuntu20.04 foxy -
RE: [FishBot教程] 6. 雷达驱动及建图测试发布在 FishBot机器人
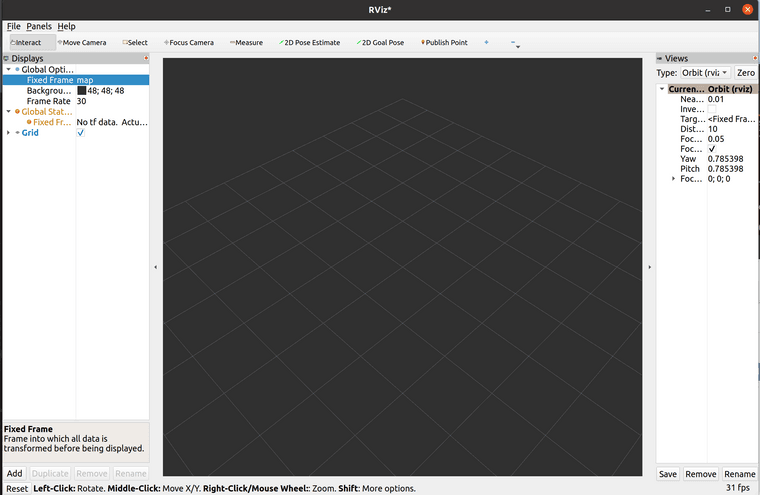
鱼哥,我的rviz里fixed_frame选项里没有laser_frame是为什么呀,之前的omed也没有,只有一个map![替代文字]
-
RE: ros2 foxy gazebo仿真kinect问题发布在 ROS2
@小鱼 感谢回复,这里有些头文件找不到,照理说这个文件在装gazebo就应该有啊,都有libgazebo_ros_camera.so了
-
ros2 foxy gazebo仿真kinect问题发布在 ROS2

gazebo仿真相机,普通相机用的是libgazebo_ros_camera.so,可以在opt/ros/foxy/lib里找到,kinect需要libgazebo_ros_openni_kinect.so在opt/ros/foxy/lib里找不到,请问哪里能获取这个文件,或者能分享一下