@小鱼 嗯嗯,感谢鱼哥
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
澄 发布的最新帖子
-
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
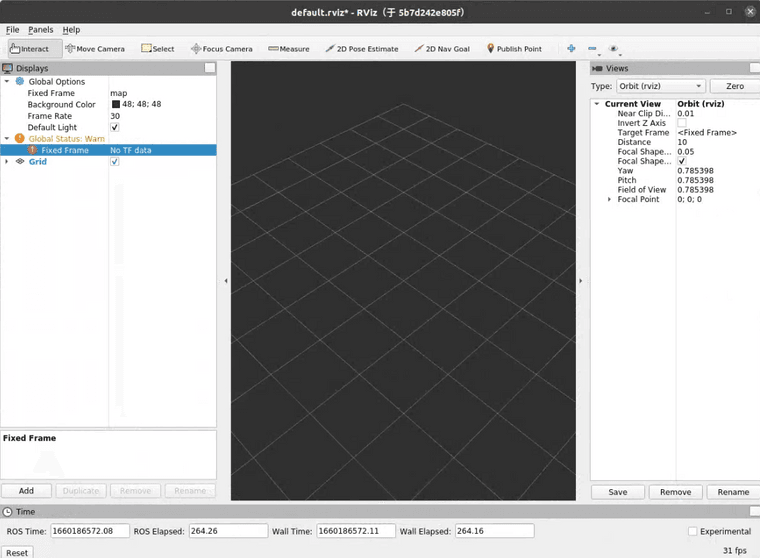
@小鱼 问题解决了,重新安装后可以运行了,太厉害了哈哈,不知道下面这个QStandardaths报错是否会有影响:
root@5b7d242e805f:/home/ji# rviz QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root' [ INFO] [1660186307.350865348]: rviz version 1.14.14 [ INFO] [1660186307.350906822]: compiled against Qt version 5.12.8 [ INFO] [1660186307.350921085]: compiled against OGRE version 1.9.0 (Ghadamon) [ INFO] [1660186307.358218726]: Forcing OpenGl version 0. [ INFO] [1660186307.612330727]: Stereo is NOT SUPPORTED [ INFO] [1660186307.612423945]: OpenGL device: Mesa Intel(R) UHD Graphics (CML GT2) [ INFO] [1660186307.612499086]: OpenGl version: 4.6 (GLSL 4.6) limited to GLSL 1.4 on Mesa system. -
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
@澄 在 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo 中说:
@小鱼 运行后跳出弹窗如下:
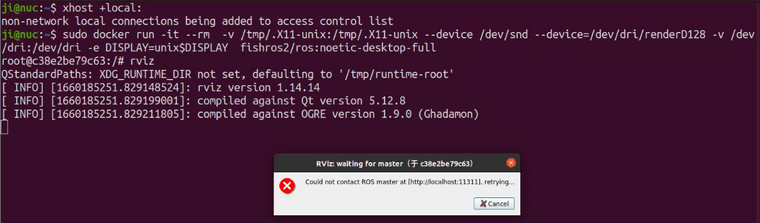
Could not contact ROS master at [http://localhost:11311], retrying.ji@nuc:~$ xhost +local: non-network local connections being added to access control list ji@nuc:~$ sudo docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd --device=/dev/dri/renderD128 -v /dev/dri:/dev/dri -e DISPLAY=unix$DISPLAY fishros2/ros:noetic-desktop-full root@c38e2be79c63:/# rviz QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root' [ INFO] [1660185251.829148524]: rviz version 1.14.14 [ INFO] [1660185251.829199001]: compiled against Qt version 5.12.8 [ INFO] [1660185251.829211805]: compiled against OGRE version 1.9.0 (Ghadamon) -
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
@小鱼
运行后报错如下:ji@nuc:~$ sudo docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd --device=/dev/dri/renderD128 -v /dev/dri:/dev/dri -e DISPLAY=unix$DISPLAY fishros2/ros:noetic-desktop-full [sudo] ji 的密码: root@390ca9b7cbf1:/# rviz No protocol specified qt.qpa.xcb: could not connect to display unix:0 qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found. This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem. Available platform plugins are: eglfs, linuxfb, minimal, minimalegl, offscreen, vnc, xcb. Aborted (core dumped) root@390ca9b7cbf1:/# exit exit ji@nuc:~$ rviz Command 'rviz' not found, but can be installed with: sudo apt install rviz -
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
@小鱼 这个命令运行后显示如下:
ji@nuc:~$ sudo docker run -it --rm -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd --device=/dev/dri/renderD128 -v /dev/dri:/dev/dri -e DISPLAY=unix$DISPLAY fishros2/ros:noetic-desktop-full [sudo] ji 的密码: root@390ca9b7cbf1:/# -
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
@小鱼 docker ps -a显示如下:
ji@nuc:~$ docker ps -a CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES c6007510217b fishros2/ros:noetic-desktop-full "/bin/bash" 2 days ago Up 39 minutes noetic_doc -
RE: 在只有集成显卡的硬件设备中,一键安装后无法使用rviz和gazebo发布在 综合问题
@小鱼 不好意思,刚接触linux系统,请问这样是在主机中运行吗,运行后显示如下:
ji@nuc:~$ xhost +local: non-network local connections being added to access control list进入docker运行rviz仍同上报错:
ji@nuc:~$ noetic_doc 请输入指令控制noetic_doc: 重启(r) 进入(e) 启动(s) 关闭(c) 删除(d) 测试(t): e root@c6007510217b:/home/ji# rviz QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root' [ INFO] [1660107576.340199138]: rviz version 1.14.14 [ INFO] [1660107576.340237485]: compiled against Qt version 5.12.8 [ INFO] [1660107576.340252722]: compiled against OGRE version 1.9.0 (Ghadamon) [ INFO] [1660107576.348258794]: Forcing OpenGl version 0. libGL error: MESA-LOADER: failed to retrieve device information libGL error: MESA-LOADER: failed to retrieve device information Segmentation fault (core dumped)