@小鱼 感谢小鱼大佬和各位站友哈,我用的事UR5固定基座机械臂。rostopic echo /gazebo/model_state,发布的信息如图所示
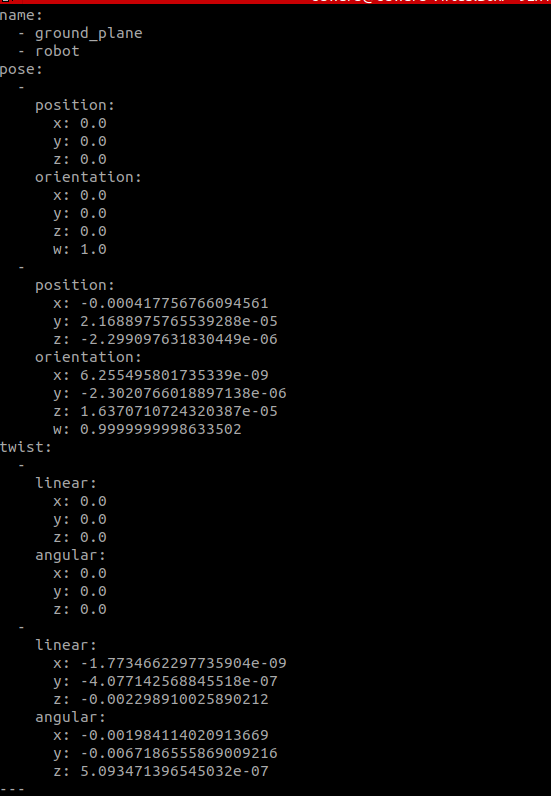
请问输出的position 和 twist 的信息是机械臂的末端执行器的位置、位姿、角速度和线速度么?谢谢大伙
@小鱼 感谢小鱼大佬和各位站友哈,我用的事UR5固定基座机械臂。rostopic echo /gazebo/model_state,发布的信息如图所示
请问输出的position 和 twist 的信息是机械臂的末端执行器的位置、位姿、角速度和线速度么?谢谢大伙
请教一下各位,请问/gazebo/model_state发布的信息是机械臂末端执行器的位置和速度么
@2308607900 我之前也遇到过类似的问题,你在config中写一个controller.yaml文件试试
@1945073649 您好,是ros1,想和simulink做一个联合仿真,控制器是在matlab中写的,想让ros把机械臂的数据时事传输给simulink,请问您有过类似项目经历么