写ros的helloworld将cpp和py放在了一个功能包,但是运行py代码时会出现两个文件,只有一个是正确的,这是为啥!!
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
旺仔牛奶 发布的最新帖子
-
大佬们晓不晓得Rs-LiDAR驱动有没有humble版本的发布在 Nav2
刚刚在github中翻了翻,只发现了ubuntu20版本的驱动教程,但是我的版本是22.04且ros2版本是humble的,想着用雷达建图,现在已经完全没得头绪了,没法进行下去了。
-
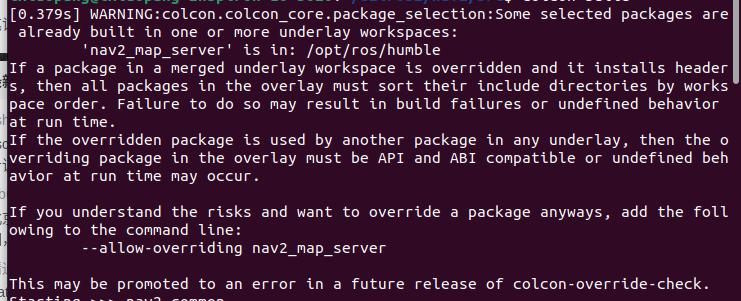
源码下载Nav2进行编译时显示humble中有重名的包,且在进行自主导航时TF错误,显示队列满发布在 综合问题
源码进行编译时会显示重名文件,覆盖后会不会有影响,
因为后面仿真也没有成功,后面的仿真会出现这个样子
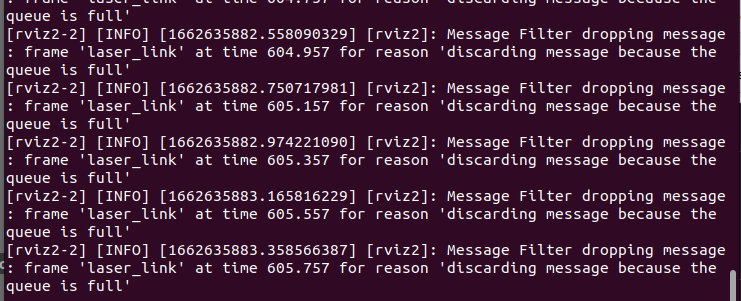
机器人也随之消失了,导航也不走