Pycharm jupyter连接docker容器 import rclpy失败 ImportError: librclpy_common.so: cannot open shared object file: No such file or directory
-
标题:Pycharm 连接docker容器 import rclpy失败 ImportError: librclpy_common.so: cannot open shared object file: No such file or directory
提问模板(建议直接复制粘贴):
背景(可选):
IDE:Pycharm
环境:Docker容器
解释器:Python 3.8.10
我使用fishros2/ros:foxy-desktop镜像构建容器,并实现Pycharm与容器连接。我想在Pycharm中使用jupyter进行《动手学ROS2》的学习

目前已知环境如下:
1.Pycharm成功通过ssh访问容器并且能够通过terminal进行正常开发。
2.在命令行中使用python直接import不会报错
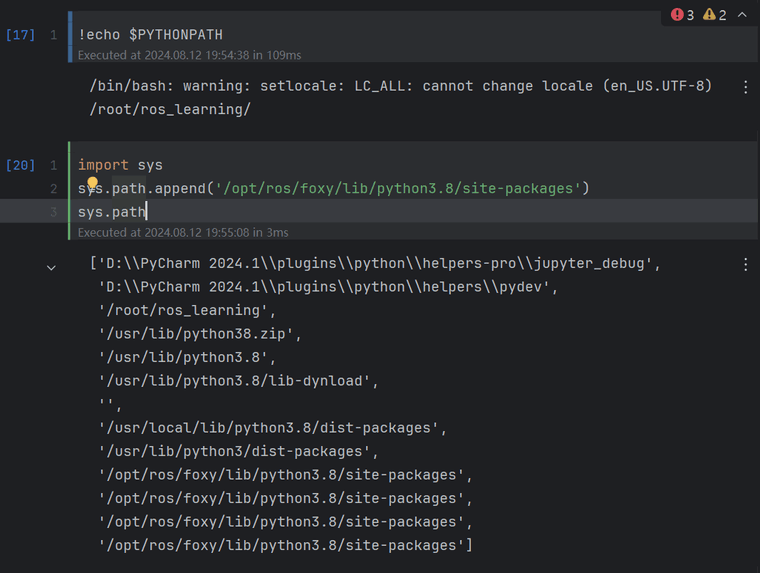
3.命令行中查看PYTHONPATH存在(该路径下有rclpy)

4.jupyter中查看PYTHONPATH不存在,需要使用sys添加路径
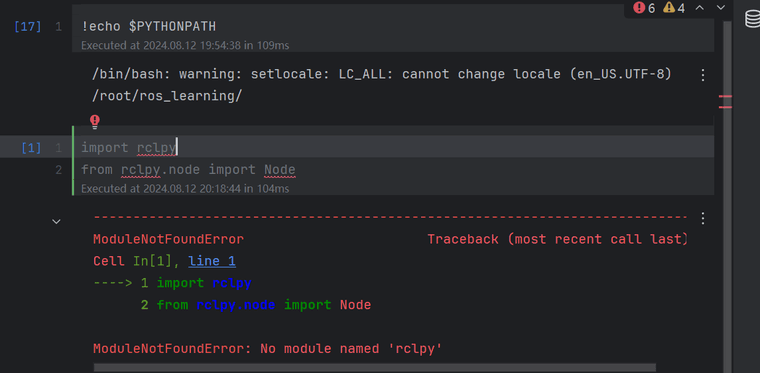
5.不使用sys添加路径时no module named rclpy
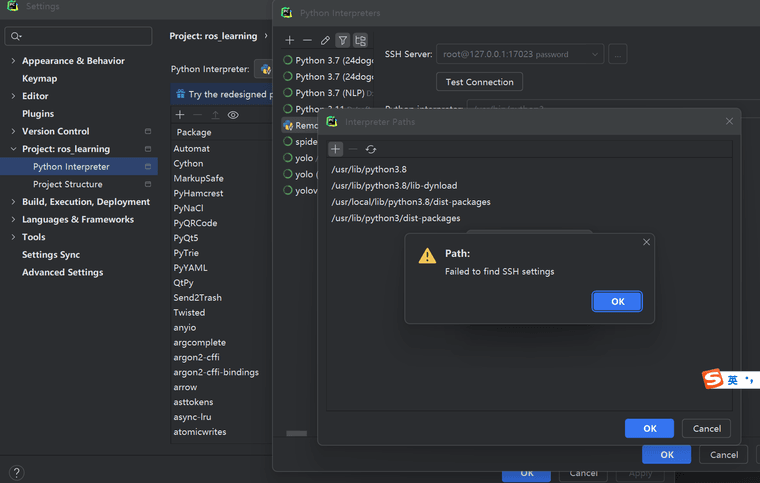
6.Pycharm解释器设置中无法添加path,报ssh错误(因为写py时没有提示,因此尝试添加路径,但是失败了)
问题描述:
ImportError: librclpy_common.so: cannot open shared object file: No such file or directory The C extension '/opt/ros/foxy/lib/python3.8/site-packages/rclpy/_rclpy.cpython-38-x86_64-linux-gnu.so' failed to be imported while being present on the system. Please refer to 'https://index.ros.org/doc/ros2/Troubleshooting/Installation-Troubleshooting/#import-failing-even-with-library-present-on-the-system' for possible solutions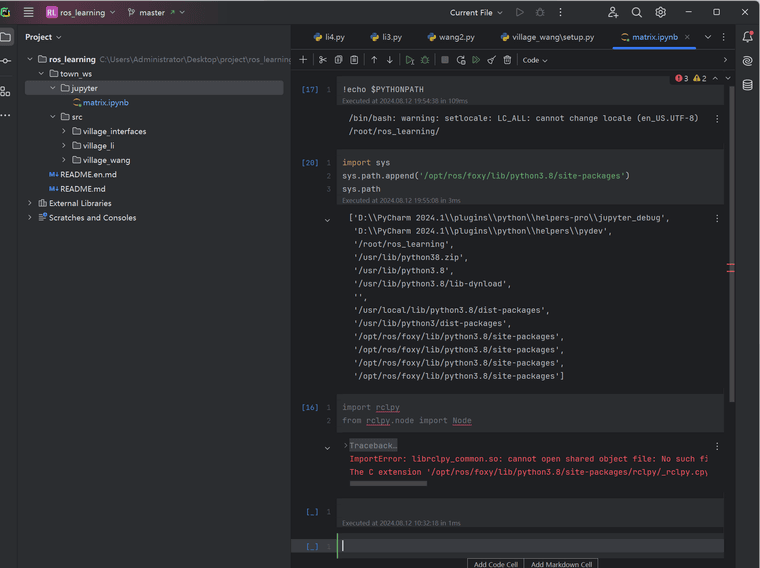
具体细节和上下文:
- [列出任何相关细节或前后操作,以帮助回答者更好地理解您的问题。]
参考资料
尝试过的解决方法:
- 使用sys添加路径
- 解释器管理器中添加路径
- terminal中 ~/.bashrc中添加路径
- 重新设置PYTHONPATH
- setcap(参考链接1)
- [列出任何相关细节或前后操作,以帮助回答者更好地理解您的问题。]
-
针对您遇到的问题,即在PyCharm的Jupyter环境中无法正确导入
rclpy并出现ImportError: librclpy_common.so: cannot open shared object file: No such file or directory的错误,这里有几个可能的解决步骤和建议:1. 确保Jupyter Notebook的Python环境正确
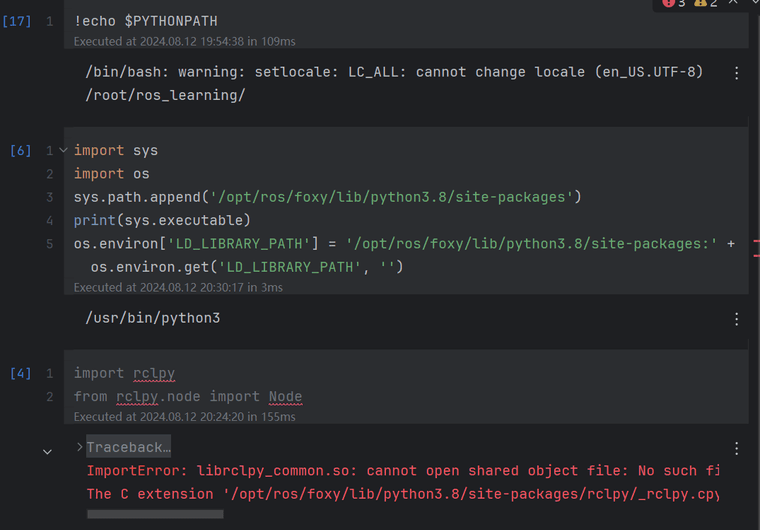
首先,确保Jupyter Notebook使用的是与命令行中相同的Python解释器。在Jupyter Notebook中,您可以通过以下代码检查当前使用的Python解释器路径:
import sys print(sys.executable)确保这个路径与您在命令行中使用的Python解释器路径相同。
2. 设置正确的环境变量
由于您提到在Jupyter中
PYTHONPATH不存在,您需要在Jupyter Notebook中设置这些环境变量。这可以通过在Notebook中运行以下代码来实现:import sys import os # 添加ROS2的Python库路径 ros2_path = '/opt/ros/foxy/lib/python3.8/site-packages' if ros2_path not in sys.path: sys.path.append(ros2_path) # 设置LD_LIBRARY_PATH以包含ROS2的库 os.environ['LD_LIBRARY_PATH'] = '/opt/ros/foxy/lib:' + os.environ.get('LD_LIBRARY_PATH', '')3. 检查Docker容器的配置
确保Docker容器中的ROS2环境已经正确安装和配置。您可以在Docker容器的命令行中运行ROS2的示例或测试脚本来验证ROS2环境是否工作正常。
4. 使用Docker Compose或Dockerfile自定义环境
如果您经常需要这样的配置,考虑使用Docker Compose或修改Dockerfile来预配置这些环境变量和路径。这样,每次启动容器时都会自动设置这些配置。
5. 检查PyCharm的远程解释器设置
虽然您提到在PyCharm的解释器设置中遇到了SSH错误,但确保您正确设置了SSH连接和远程解释器路径。这通常涉及到指定SSH服务器的地址、端口、用户名、密码/密钥,以及远程Python解释器的路径。
6. 重启PyCharm和Docker容器
有时候,简单的重启PyCharm和Docker容器可以解决一些看似复杂的问题。
7. 查看ROS2和PyCharm的兼容性
确保您使用的ROS2版本与PyCharm和Python版本兼容。ROS2的不同版本可能支持不同的Python版本。
8. 查阅官方文档和社区
如果上述步骤都不能解决问题,建议查阅ROS2和PyCharm的官方文档,或在相关的社区和论坛中搜索或提问。
希望这些步骤能帮助您解决问题!如果还有其他问题,请继续提问。
以上为生成回答,仅供参考~
-
@小伊 已经按照以上尝试,仍然无法解决
-
当你遇到一个问题,并且已经尝试了多种方法但仍然无法解决时,可以考虑以下几个步骤来进一步诊断和解决问题:
-
详细记录问题:
- 确保你清楚地记录了问题的具体表现、出现的频率、以及任何可能触发该问题的操作。
- 如果可能,使用截图、日志文件或视频来辅助说明问题。
-
检查假设:
- 重新审视你的假设和已经尝试的解决方案,确保你没有遗漏任何重要的信息或步骤。
- 思考是否有其他可能的原因或解决方案没有尝试过。
-
搜索更多资源:
- 利用搜索引擎查找与你问题相关的更多信息和解决方案。
- 访问专业论坛、社区或技术博客,看看其他人是如何解决类似问题的。
-
简化问题:
- 尝试将问题简化到最基本的形式,以便更容易地定位问题的根源。
- 例如,如果是一个软件问题,尝试在一个干净的环境中重新安装软件,看看问题是否仍然存在。
-
寻求外部帮助:
- 如果自己无法解决问题,可以考虑寻求外部帮助。
- 可以向同事、朋友或专业的技术支持团队求助。
- 在社交媒体、技术论坛或问答网站上发布你的问题,并提供足够的背景信息和细节。
-
分析日志和错误信息:
- 如果问题涉及到软件或系统错误,仔细分析日志文件和错误信息。
- 这些信息通常可以提供关于问题根源的线索。
-
更新和修补:
- 确保你的系统和所有相关软件都是最新版本,并安装了所有必要的补丁和更新。
- 过时的软件或系统可能包含已知的错误和漏洞,这些可能会导致你遇到的问题。
-
硬件检查:
- 如果问题可能与硬件相关,检查硬件连接是否正确,并确保所有硬件组件都在正常工作。
- 可以尝试使用硬件诊断工具来测试硬件是否有问题。
-
考虑替代方案:
- 如果问题无法解决,或者解决的成本太高,考虑是否有替代方案可以实现相同的目标。
记住,解决问题往往需要耐心和毅力。有时候,即使是最简单的问题也可能需要花费一些时间来找到正确的解决方案。
以上为生成回答,仅供参考~
-