运行gazebo.launch.py时只发布部分坐标
-
这是gazebo.launch.py
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageSharedef generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') gazebo_world_path = os.path.join(pkg_share, 'world/fishbot.world') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen') ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) return ld这是tf树
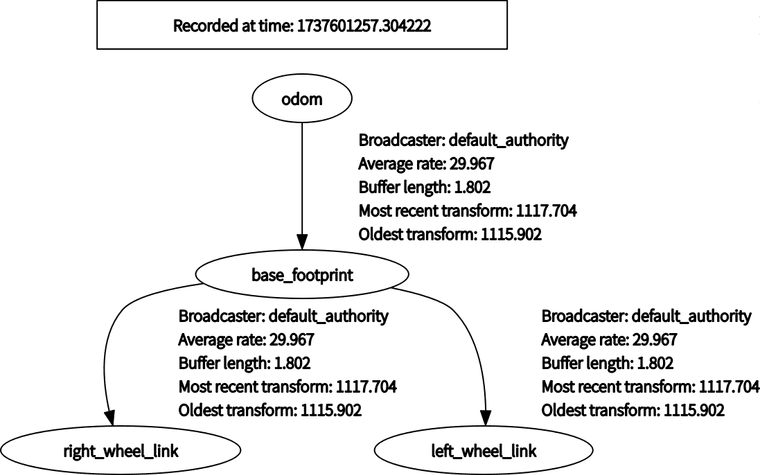
这是urdf
<?xml version="1.0"?>
<robot name="fishbot"><!-- Robot Footprint -->
<link name="base_footprint"/><joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint><!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link><!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_link" />
<origin xyz="0 0 0.075" />
</joint><link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.02" />
</joint><link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="-0.02 0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="-0.02 -0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="caster_joint" type="fixed">
<parent link="base_link" />
<child link="caster_link" />
<origin xyz="0.06 0.0 -0.076" />
<axis xyz="0 1 0" />
</joint><gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
</gazebo><gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.065</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
</gazebo><gazebo reference="imu_link"> <sensor name="imu_sensor" type="imu"> <plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"> <ros> <namespace>/</namespace> <remapping>~/out:=imu</remapping> </ros> <initial_orientation_as_reference>false</initial_orientation_as_reference> </plugin> <always_on>true</always_on> <update_rate>100</update_rate> <visualize>true</visualize> <imu> <angular_velocity> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </z> </angular_velocity> <linear_acceleration> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </z> </linear_acceleration> </imu> </sensor> </gazebo><gazebo reference="laser_link">
<sensor name="laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>10</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>3.5</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray><plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <remapping>~/out:=scan</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>laser_link</frame_name> </plugin> </sensor> </gazebo></robot>
-
这个是终端信息
[INFO] [launch]: All log files can be found below /home/yywx/.ros/log/2025-01-23-21-38-01-120411-yywx-THUNDEROBOT-DT-Computer-31749
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [gazebo-1]: process started with pid [31751]
[INFO] [spawn_entity.py-2]: process started with pid [31753]
[gazebo-1] Gazebo multi-robot simulator, version 11.10.2
[gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation.
[gazebo-1] Released under the Apache 2 License.
[gazebo-1] http://gazebosim.org
[gazebo-1]
[gazebo-1] Gazebo multi-robot simulator, version 11.10.2
[gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation.
[gazebo-1] Released under the Apache 2 License.
[gazebo-1] http://gazebosim.org
[gazebo-1]
[spawn_entity.py-2] [INFO] [1737639481.363345020] [spawn_entity]: Spawn Entity started
[spawn_entity.py-2] [INFO] [1737639481.363552549] [spawn_entity]: Loading entity XML from file /home/yywx/fishbot_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_gazebo.urdf
[spawn_entity.py-2] [INFO] [1737639481.364003208] [spawn_entity]: Waiting for service /spawn_entity, timeout = 30
[spawn_entity.py-2] [INFO] [1737639481.364135976] [spawn_entity]: Waiting for service /spawn_entity
[spawn_entity.py-2] [INFO] [1737639481.867763540] [spawn_entity]: Calling service /spawn_entity
[spawn_entity.py-2] [INFO] [1737639481.959349670] [spawn_entity]: Spawn status: SpawnEntity: Successfully spawned entity [fishbot_1]
[gazebo-1] [INFO] [1737639482.068496261] [diff_drive]: Wheel pair 1 separation set to [0.200000m]
[gazebo-1] [INFO] [1737639482.068713833] [diff_drive]: Wheel pair 1 diameter set to [0.065000m]
[gazebo-1] [INFO] [1737639482.069244602] [diff_drive]: Subscribed to [/cmd_vel]
[gazebo-1] [INFO] [1737639482.070318787] [diff_drive]: Advertise odometry on [/odom]
[gazebo-1] [INFO] [1737639482.071706849] [diff_drive]: Publishing odom transforms between [odom] and [base_footprint]
[gazebo-1] [INFO] [1737639482.071722493] [diff_drive]: Publishing wheel transforms between [base_footprint], [left_wheel_joint] and [right_wheel_joint]
[INFO] [spawn_entity.py-2]: process has finished cleanly [pid 31753]
[gazebo-1] [Msg] Waiting for master.
[gazebo-1] [Msg] Connected to gazebo master @ http://127.0.0.1:11345
[gazebo-1] [Msg] Publicized address: 192.168.1.13
[gazebo-1] [Msg] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[gazebo-1] [Wrn] [Event.cc:61] Warning: Deleting a connection right after creation. Make sure to save the ConnectionPtr from a Connect call