rqt_graph中没有/cmd_vel节点,gazebo中小车模型不动
-
标题:rqt_graph中没有/cmd_vel节点,gazebo中小车模型不动
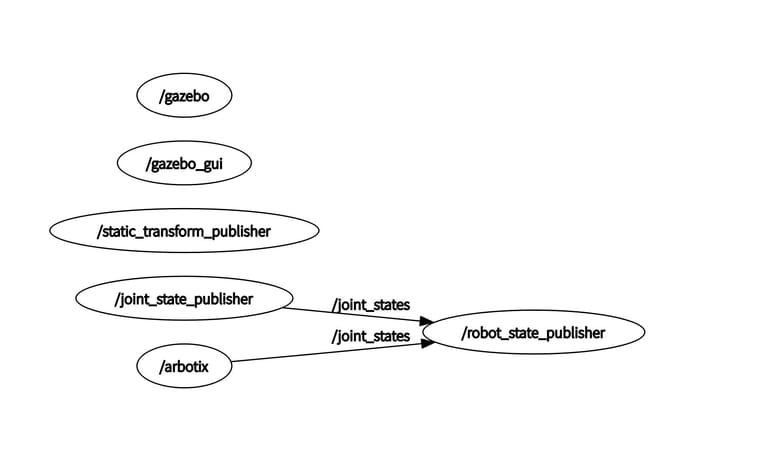
问题描述:rviz中的小车模型可以动,但是gazebo中的模型还是没反应,运行rqt_graph发现没有/cmd_vel节点,而且gazebo节点和静态坐标节点全是独立的,图片如下:
具体细节和上下文:
node only:
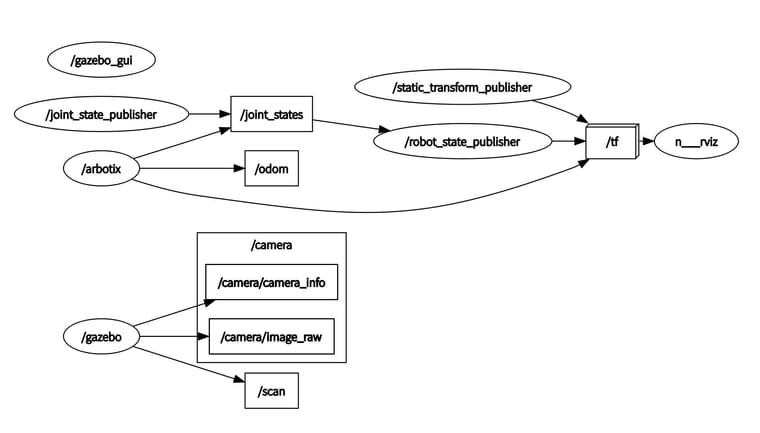
node all:
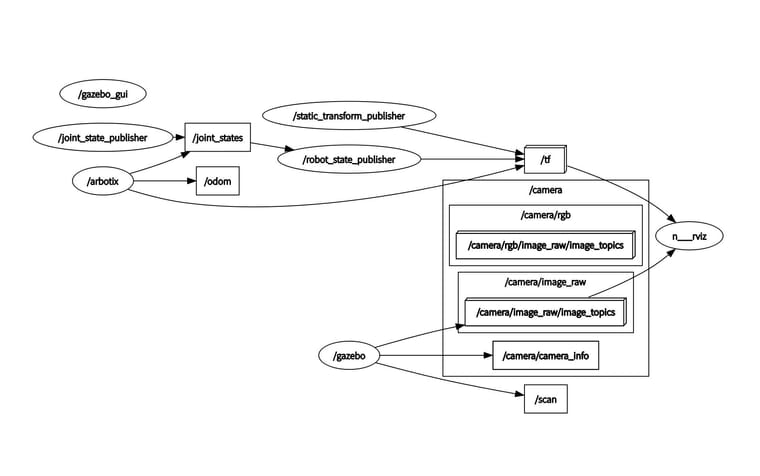
node active:
尝试过的解决方法:
添加过gazebo to cmd_vel的python文件和节点,但是还是不行 -
针对您描述的问题,即Gazebo中的小车模型不动,同时
rqt_graph中没有显示/cmd_vel节点,这通常意味着您的ROS系统没有正确地发送速度命令到Gazebo中的小车模型。这里有几个可能的解决步骤和检查点:-
检查ROS节点是否启动:
确保所有必要的ROS节点都已经启动,特别是那些负责生成/cmd_vel消息的节点。如果您是手动控制小车,确保您的控制节点(如键盘控制节点)已经启动。 -
检查ROS话题映射:
使用rostopic list命令查看当前ROS系统中所有的话题列表。确认是否有/cmd_vel话题存在。如果没有,那么需要查找为什么该话题没有被发布。 -
检查Gazebo与ROS的接口:
确保您的Gazebo模型和ROS之间的接口设置正确。这通常涉及到在Gazebo中加载的模型是否包含了接收/cmd_vel话题的插件(如diff_drive_controller或ackermann_controller)。 -
检查URDF或SDF文件:
查看您的Gazebo模型文件(URDF或SDF格式),确保模型定义了接受/cmd_vel的控制器,并且这些控制器被正确配置并启动。 -
检查启动文件:
检查您的ROS启动文件(如.launch文件),确保所有必要的ROS节点和服务都被正确启动,包括那些启动Gazebo控制器和可能的其他ROS桥接节点的。 -
使用
rosnode和rostopic调试:- 使用
rosnode info [node_name]来查看特定节点的详细信息,确认它是否订阅或发布了/cmd_vel。 - 使用
rostopic echo /cmd_vel(如果话题存在)来查看是否有消息在发布。 - 使用
rostopic pub /cmd_vel geometry_msgs/Twist "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}"来手动发送命令,看看小车是否响应。
- 使用
-
查看Gazebo的日志:
在Gazebo中查看是否有任何错误或警告信息,这些信息可能会提供为什么小车没有响应的线索。 -
重新编译和重新启动:
如果以上步骤都无法解决问题,尝试重新编译您的ROS包并重新启动所有相关节点和Gazebo。 -
检查网络配置:
如果您在使用多台机器或虚拟机,确保ROS的MASTER_URI和ROS_HOSTNAME设置正确,以便节点可以相互通信。
通过上述步骤,您应该能够定位问题的根源,并找到解决问题的方法。如果问题依然存在,可能需要更详细地检查您的ROS和Gazebo配置。
以上为生成回答,仅供参考~
-