9.5.5 完成机器人建图并保存地图。'discarding message because the queue is full'。no map received
-
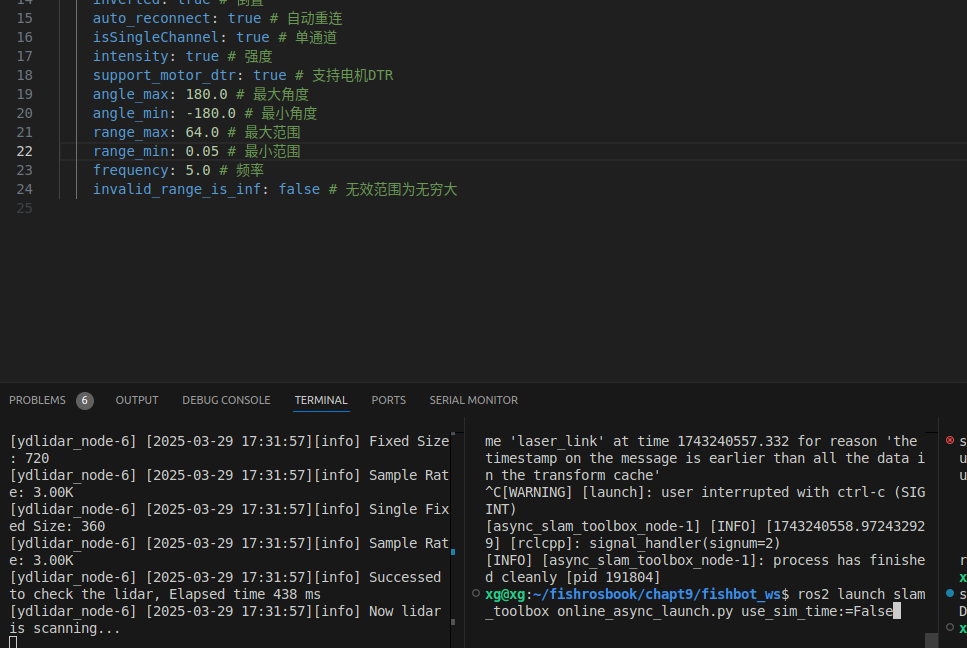
我在执行完ros2 launch fishbot_bringup bringup.launch.py已经看到雷达正在运行提示了。
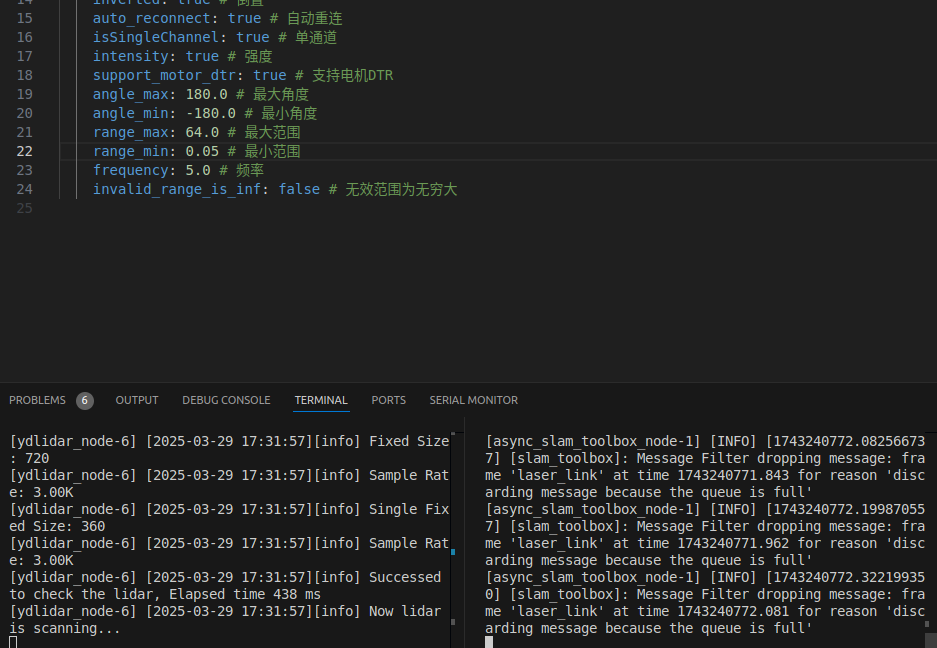
这时我运行:ros2 launch slam_toolbox online_async_launch.py use_sim_time:=False.提示:[async_slam_toolbox_node-1] [INFO] [1743240557.095263110] [slam_toolbox]: Message Filter dropping message: frame 'laser_link' at time 1743240556.855 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1743240557.213141763] [slam_toolbox]: Message Filter dropping message: frame 'laser_link' at time 1743240556.974 for reason 'discarding message because the queue is full'。
这时我再打开rviz2,添加map后,提示no map received。
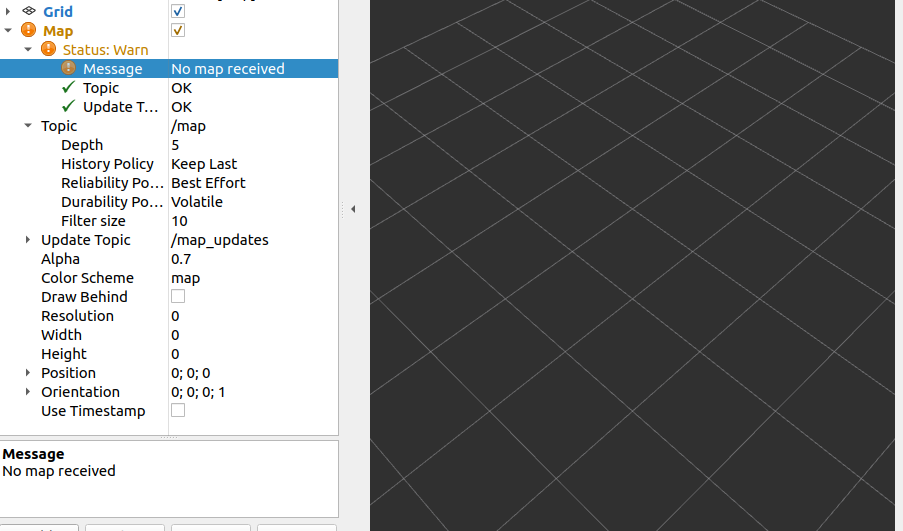
-
@905399126 兄弟,你的虚拟机是怎么配置的,我连接不上microros_
agent -
@1117 你看小鱼的视频,中间有个github地址如果下载有问题的话就用那个链接。然后就等着就可以了
-
@1117 如果你遇到其他问题也可以在这个贴子上回复。我当时也遇到了几个编译问题。