Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
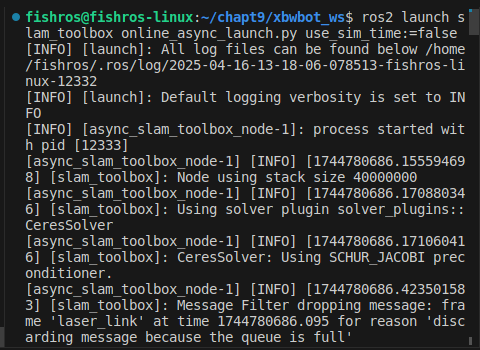
在运行指令os2 launch slam_toolbox online_async_launch.py use_sim_time:=false 且雷达正常工作情况下报错,使用rviz也无法接收到地图数据
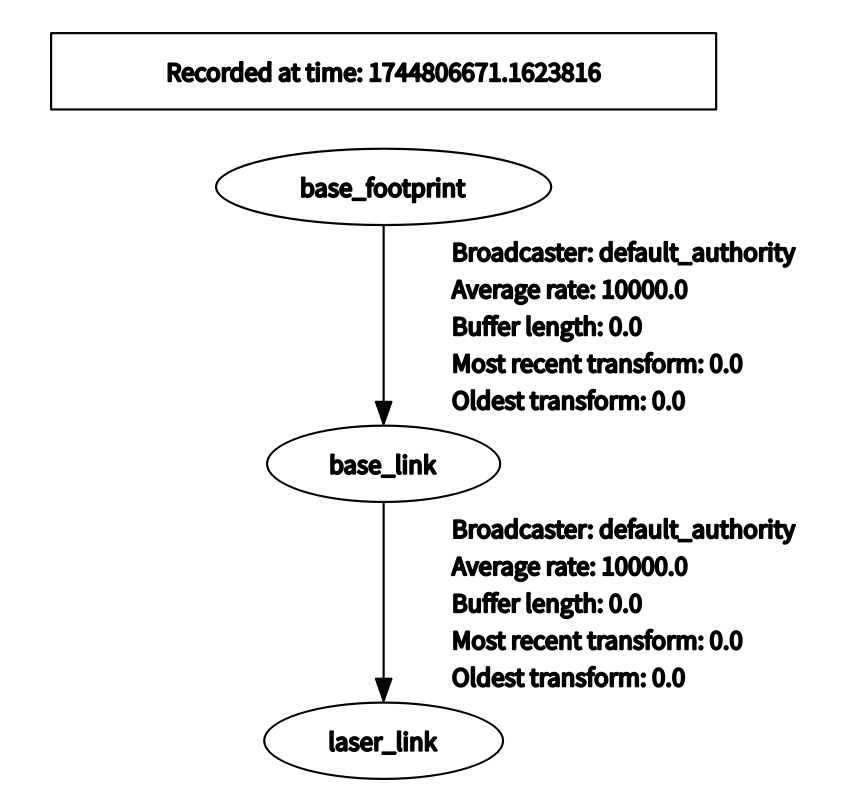
运行ros2 launch fishbot_bringup bringup.launch.py后的tf tree。