机械臂力反馈遥操作的简易实现
-
机械臂,遥操作+加力反馈,如何实现?
遥操作:通过手柄,手机,或者任何形式的“遥控器”遥控机械臂的运动。最简单的形式就是以一个机械臂(主臂)遥控另一个机械臂(从臂)。
力反馈:当从臂碰到障碍物时,主臂可以以力的形式感受到这个障碍物,所谓“感受”就是操作者感受到主臂的力。
代码:https://gitee.com/qingqing-gaq/feel_force.git
视频:https://www.bilibili.com/video/BV1KoEqzyEFR/?vd_source=36451ca805358187c4a0efa1c5694b35
我的实现思路:
软件:rso2
硬件:双通道usb转can模块,六个达妙4310电机。六个电机,组成两个三自由度机械臂。一个can通道控制一个机械臂。
大体逻辑:
主臂时重力补偿模式,因为只有重力补偿才能任意拖动。主臂把实时的关节位置,发送给从臂,因此从臂必然是位置控制模式,这样才能跟踪主臂的位置。
那么主臂如何感受从臂的力呢?这里就需要电机有力矩接口了(达妙电机的mit模式),当从臂电机受到阻力时,pid控制力就会变大,电机反馈会的力也会变大,这个变大的值就是阻力了。把这个力反馈给主臂即可。
程序运行逻辑:
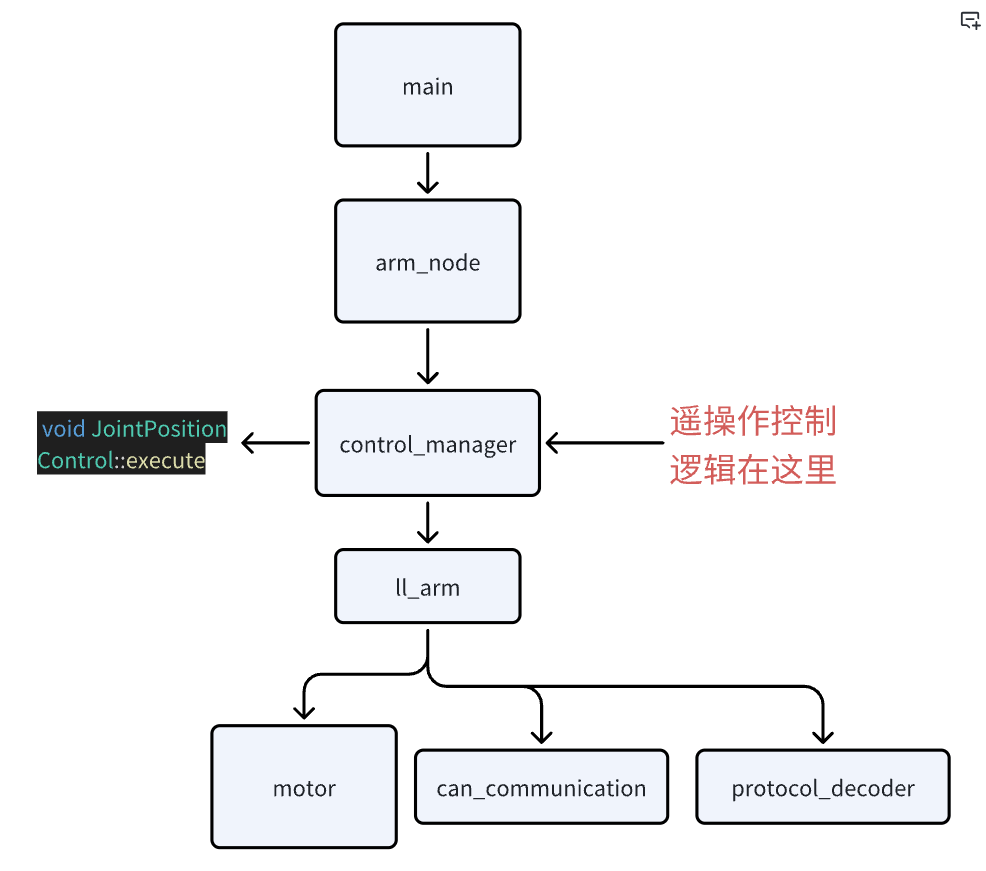
操作逻辑的代码:std::cout << "JointPositionControl::execute..............." << std::endl; //从对应的can接收线程中读取电机状态,并更新到机械臂类储存关节状态的变量(下面会用到)中 arm->update_current_joint_states();//一定要在get_current_joint_states()之前执行 arm2->update_current_joint_states();//一定要在get_current_joint_states()之前执行 //从机械臂类里返回储存关节状态的变量 const auto &curret_joint_states = arm->get_current_joint_states(); const auto &curret_joint_states2 = arm2->get_current_joint_states(); //根据当前的关节状态,计算逆动力学,进行重力补偿。 arm->computeInverseDynamics(arm->current_joint_positions, arm->current_joint_velocities, arm->current_joint_acceleration, arm->gravity_joint_tauqes); arm2->computeInverseDynamics(arm2->current_joint_positions, arm2->current_joint_velocities, arm2->current_joint_acceleration, arm2->gravity_joint_tauqes); std::vector<float> pos1(arm->getDof(), 0.0f); std::vector<float> pos2(arm->getDof(), 0.0f); std::vector<float> vel(arm->getDof(), 0.0f); std::vector<float> vel2(arm->getDof(), 0.0f); std::vector<float> tor(arm->getDof(), 0.0f); std::vector<float> tor2(arm2->getDof(), 0.0f); for (size_t i = 0; i < arm->getDof(); i++) { if(i==2) {//三号电机转向和模型相反,所以要单独加一个负号 tor[i] = -arm->gravity_joint_tauqes(i);//发送给主臂的重力补偿力矩 tor2[i] = -arm2->gravity_joint_tauqes(i);//发送给从臂的重力补偿力矩 } else { tor[i] = arm->gravity_joint_tauqes(i);//发送给主臂的重力补偿力矩 tor2[i] = arm2->gravity_joint_tauqes(i);//发送给主臂的重力补偿力矩 } //主臂的关节速度,发送给从臂 vel2[i] = 0.10 * curret_joint_states.at(i).velocity; // 系数越大手感越硬。 //主臂的关节位置,发送给从臂 pos2[i] = curret_joint_states.at(i).position; } float torque_threshold = 0.04f; // 设置阈值 //从臂受到的阻力,返回给主臂 for (size_t i = 0; i < arm->getDof(); i++) { if (std::abs(curret_joint_states2.at(i).torque) > torque_threshold) { tor[i] += -0.5 * (curret_joint_states2.at(i).torque - tor2[i]); // 如果超过阈值,按原逻辑计算 } else { tor[i] += 0.0f; // 否则赋值为 0 } } // pos2[0] = 0; tor2[0] = 0; arm->send_joint_states(pos1, vel, tor);//向主臂发送关节的状态 arm2->send_joint_states(pos2, vel2, tor2);//向从臂发送关节的状态其中:主臂位置发送给从臂的逻辑好理解。
pos2[i] = curret_joint_states.at(i).position; //curret_joint_states.at(i).position:主臂的实时关节位置 //pos2[i]:发送给从臂的关节位置这一句是从臂的力矩反馈给主臂。有一步操作是从臂反馈的力矩减去了重力补偿力矩,这是因为,反馈的电机力矩是pid产生的。这个pid产生的控制力矩就包含重力力矩,如果把这个力也算上发送给主臂,那主臂就会变的很称,因为从臂把重力也传过来了。
tor[i] += -0.5 * (curret_joint_states2.at(i).torque - tor2[i]); //tor[i]: 发送给主臂的关节力矩 //curret_joint_states2.at(i).torque:从臂电机反馈会来的力矩 //tor2[i]:发送给从臂的重力补偿力矩。 //-0.5:缩放系数这个if判断的作用是,避免从臂传来的力一直在小幅度波动,只有从臂反馈的力大于一个值,这个力才会被加载到主臂上。
float torque_threshold = 0.04f; // 设置阈值 //从臂受到的阻力,返回给主臂 for (size_t i = 0; i < arm->getDof(); i++) { if (std::abs(curret_joint_states2.at(i).torque) > torque_threshold) { tor[i] += -0.5 * (curret_joint_states2.at(i).torque - tor2[i]); // 如果超过阈值,按原逻辑计算 } else { tor[i] += 0.0f; // 否则赋值为 0 } }这又是一个神奇的操作。就是让从臂有期望速度。作用就是会影响操作手感。
vel2[i] = 0.10 * curret_joint_states.at(i).velocity; // 系数越大手感越硬。ok这就是整个的实现逻辑,非常简陋。
程序框架简介:https://zwf9l1z0bm3.feishu.cn/docx/Ee3EdW8meoy79uxzBQVcXe11nfh?from=from_copylink
qq交流群:523255719