rviz中Fixed Frame 不能设置为 base_link
-
为什么我在这块地方的Fixed Frame 不能为 选择为base_link啊?
01.urdf<robot name="mycar"> <link name="base_link"> <visual> <geometry> <box size="0.5 0.2 0.1" /> </geometry> </visual> </link> </robot>01.launch
<launch> <!-- 设置参数 --> <param name="robot_description" textfile="$(find urdf01)/urdf/urdf/01.urdf" /> <!-- 启动 rviz --> <node pkg="rviz" type="rviz" name="rviz" /> </launch>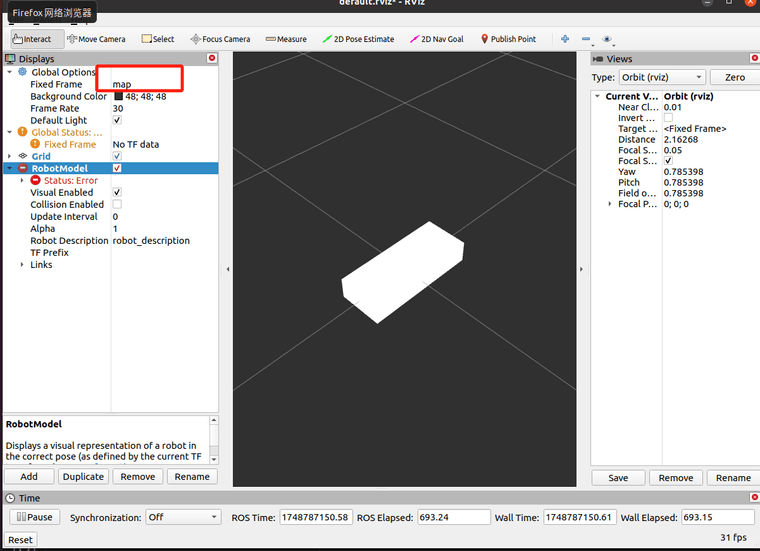 ![f4eb9402-2632-4256-a195
![f4eb9402-2632-4256-a195 -
@2954357452 双击出现光标,键盘手动将map改为base_link,然后回车。应该也能切换到base_link。
-
@1500638114 好的谢谢,已经解决了!