雷达已上路由
PING 192.168.1.103
(192.168.1.103) 56(84) bytes of data.
64 bytes from 192.168.1.103: icmp_seq=1 ttl=255 time=5.76 ms
64 bytes from 192.168.1.103: icmp_seq=2 ttl=255 tinme=23.9 ms
64 bytes from 192.168.1.103: icmp_seq=3 ttl=255 time=4.62 ms
64 bytes from 192.168.1.103: icmp_seq=4 ttl=255 timie=8.08
64 bytes from 192.168.1.103: icmp_seq=5 ttl=255 time=9.46 ms
64 bytes from 192.168.1.103: icmp_seq=6 ttl=255 time=13.2 ms
64 bytes from 192.168.1.103: icmp_seq=7 ttl=255 time=5.02 ms
ms
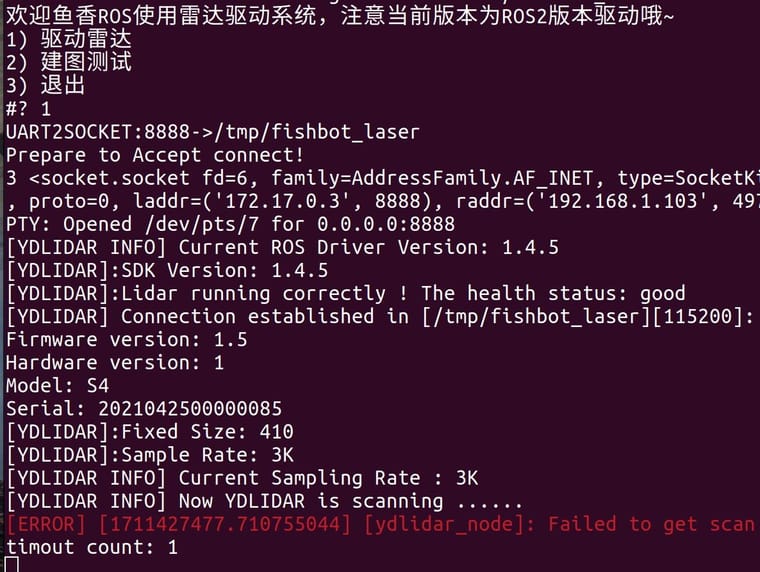
Now YDLIDAR is scanning
等5 -10 分钟左右,出 timout count
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动功哦
1)驱动雷达
2)建图测试
3)退出
#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketK
, proto=0, laddr=('172.17.0.3', 8888), raddr=(
PTY: Opened /dev/pts/7 for 0.0.0.0:8888
192.168.1.103', 49
[YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[YDLIDAR] :SDK Version: 1.4.5
[YDLIDAR]:Lidar running correctly ! The health statuus: good
[YDLIDAR] Connection established in [/tmp/fishbot_laser][[115200] :
Firmware version: 1.5
Hardware version: 1
Model: S4
Serial: 2021042500000085
[YDLIDAR]:Fixed Size: 410
[YDLIDAR]:Sample Rate: 3K
[YDLIDAR INFO] Current Sampling Rate : 3K
[YDLIDAR INFO]
Now YDLIDAR is scanning
[ERROR] [1711427477.710755044] [ydlidar_node]: Failed to getscan
timout count: 1
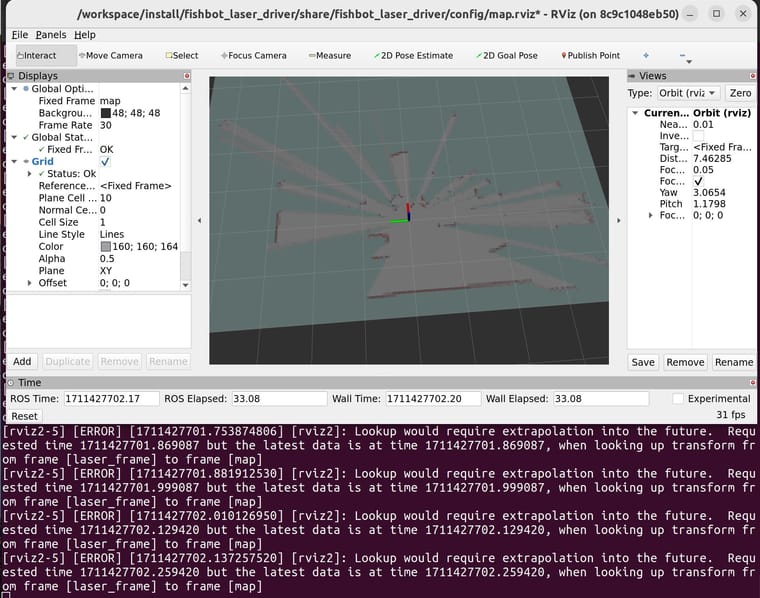
但是,选 2 测试,又能扫出东西来,虽然有报错
[rviz2-5] [ERROR] [1711427701.753874806] [rviz2]: Lobookup would require extrapolation into the future.Requ
Tested time 1711427701.869087 but the latest datais at time 1711427701.869087, when looking up transform fin
om frame [laser_frame] to frame [map]
list 有 scan 的会话,但是无效的
fp-macpro@fpmacpro-MacBookPro:~$ ros2 topic list
/parameter_events
/rosout
/scan
fp-macpro@fpmacpro-MacBookPro:~$ ros2 topic hz /scan
WARNING: topic [/scan] does not appear to be published yet
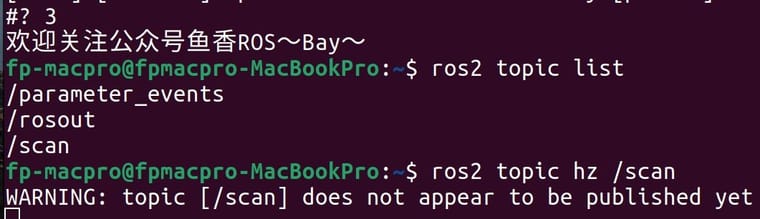
请问啥问题?和 帖子里说的 timout count: 1 的原因好像不一样啊?
@小鱼