在使用rosdepc update时出现的问题
-
ubuntu版本:20.04
在使用一件安装rosdep后,运行rosdepc update报错:niu@niu-Legion-Y7000P-2019:~/catkin_ws/src$ rosdepc update
Traceback (most recent call last):
File "/usr/local/bin/rosdepc", line 5, in <module>
from rosdepc.rosdepc import main
File "/usr/local/lib/python3.8/dist-packages/rosdepc/init.py", line 1, in <module>
from .rosdepc import main
File "/usr/local/lib/python3.8/dist-packages/rosdepc/rosdepc.py", line 3, in <module>
import rosdep2
File "/usr/lib/python3/dist-packages/rosdep2/init.py", line 45, in <module>
from .lookup import RosdepDefinition, RosdepView, RosdepLookup,
File "/usr/lib/python3/dist-packages/rosdep2/lookup.py", line 44, in <module>
from .sources_list import SourcesListLoader
File "/usr/lib/python3/dist-packages/rosdep2/sources_list.py", line 42, in <module>
from .gbpdistro_support import get_gbprepo_as_rosdep_data, download_gbpdistro_as_rosdep_data
File "/usr/lib/python3/dist-packages/rosdep2/gbpdistro_support.py", line 14, in <module>
from .platforms.debian import APT_INSTALLER
File "/usr/lib/python3/dist-packages/rosdep2/platforms/debian.py", line 34, in <module>
from rospkg.os_detect import (
ImportError: cannot import name 'OS_POP' from 'rospkg.os_detect' (/home/niu/.local/lib/python3.8/site-packages/rospkg/os_detect.py)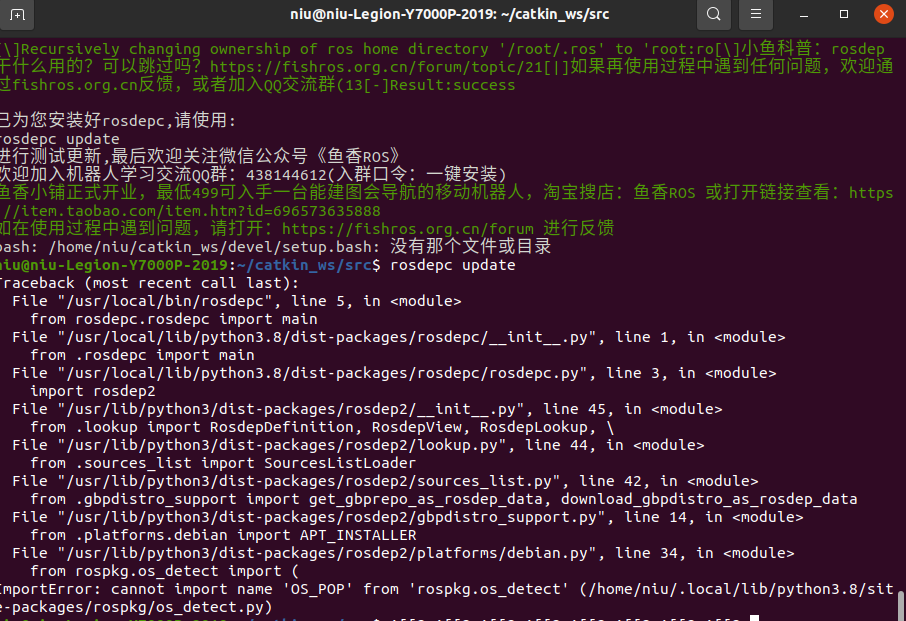
-
这个错误提示是由于在
rospkg的os_detect.py文件中不存在OS_POP这个导入项,但你的系统或某个已安装的包试图从那里导入它。这通常发生在包的版本不兼容或者错误安装的情况下。解决步骤
-
检查
rospkg的版本:
首先,确认你安装的rospkg版本是否与你的 ROS 版本兼容。可以使用以下命令来查看已安装的rospkg版本:pip show rospkg或者,如果你使用 apt-get 安装的 ROS,则可能需要查看 ROS 的版本和依赖关系。
-
更新或重新安装
rospkg:
如果rospkg版本过旧或损坏,尝试更新或重新安装它。由于你使用的是 Ubuntu 20.04,并且可能通过 apt-get 安装了 ROS,首先尝试通过 apt 更新所有 ROS 相关的包:sudo apt update sudo apt upgrade sudo apt install --only-upgrade ros-<distro>-rospkg # 替换 <distro> 为你的 ROS 版本,如 melodic, noetic 等如果 apt 仓库中没有更新版本的
rospkg,或者你使用的是 pip 安装的rospkg,你可以尝试使用 pip 来更新或重新安装:pip uninstall rospkg pip install rospkg注意:如果你同时使用 apt 和 pip 安装 Python 包,可能会导致版本冲突。尽量使用一种方式来管理 Python 包。
-
检查 Python 环境:
确保你没有在 Python 环境中混入多个版本的包。你可以使用pip list查看已安装的包和它们的版本。 -
清理和重建工作空间:
如果你的 ROS 工作空间中有损坏的依赖,尝试清理并重新构建工作空间:cd ~/catkin_ws catkin_make clean catkin_make -
检查 ROSDEP:
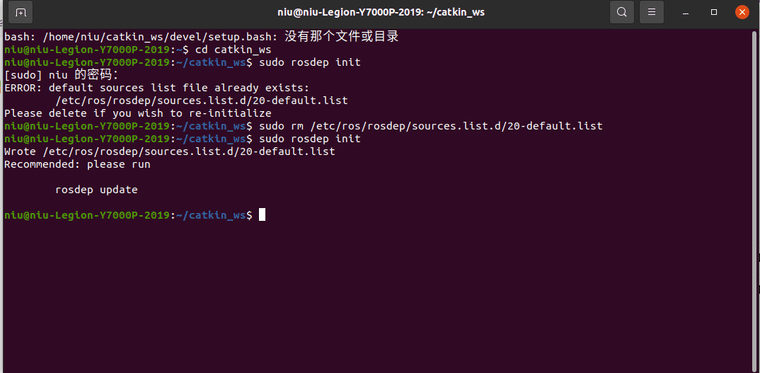
确保rosdep本身也是最新的,并且配置正确。你可以运行:sudo rosdep init rosdep update -
查看 ROS 社区和文档:
如果上述步骤都不能解决问题,查看 ROS 社区论坛或官方文档可能会有帮助。
通过上述步骤,你应该能够解决
rosdepc update命令中的错误。如果问题仍然存在,可能需要更深入地检查你的系统配置或寻求专业的帮助。
以上为生成回答,仅供参考~
-
-
还是不行,还是会报错ImportError: cannot import name 'OS_POP' from 'rospkg.os_detect' (/home/niu/.local/lib/python3.8/site-packages/rospkg/os_detect.py)
-
@2972741528 sudo rosdep init 呢
-
@小鱼 sudo rosdep init是正常的
-
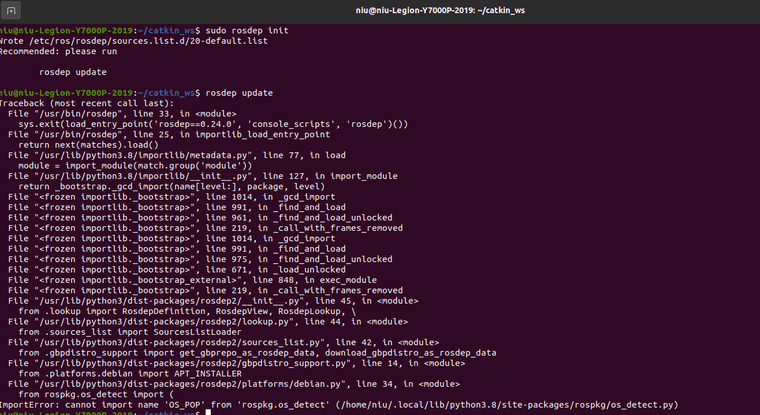
@2972741528 运行rosdep update后仍然会出现ImportError: cannot import name 'OS_POP' from 'rospkg.os_detect' 的问题
-
@2972741528 rosdepc update
看样子像是你的操作系统不支持欸