运动学3-----正向运动学
-
终于到了这个正向运动学了~~~
上一节说了,机器人学在变换形式上是比图形简单许多的,那么我们就来看看上一节的坐标变换有什么应用。
一、分杆定关节
记住一句话,向后看关节,就 是指,杆上会固定有两个关节,一个是和杆是同号的,一个是比杆下一号的。
1.机器人连杆与关节的标号
先标号,再建系。
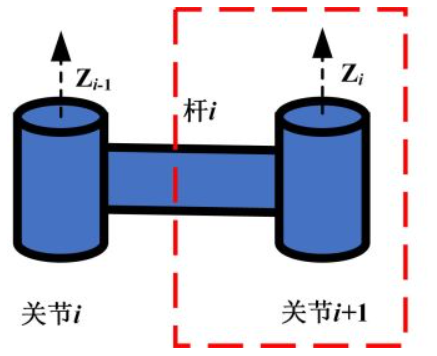
连杆编号:基座为杆0,从基座往后依次定义为杆1,杆2,…,杆i;
关节编号:杆i离基座近的一端(近端)的关节为关节i,远的一端(远端)为关节i+1。
为便于理解,这里我把连杆的近端用绿色表示,远端用橙色表示,且远端驱动近端转动。大家只要记住一句话,连杆近端关节的标号和连杆标号是一致的。
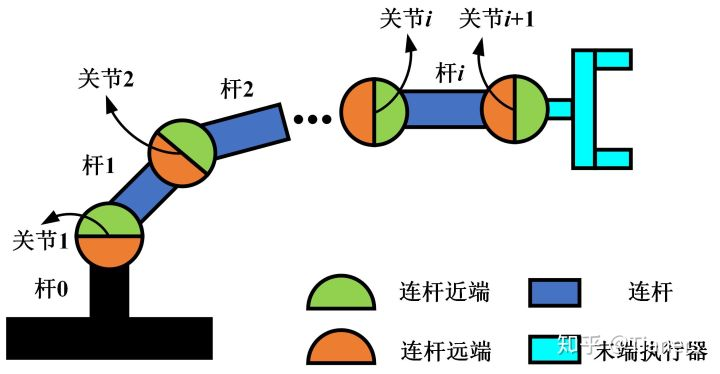
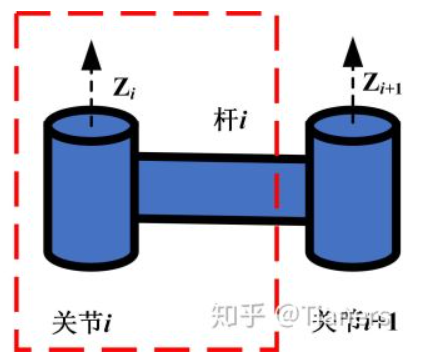
图1连杆和关节标号二、确定Z方向,再确定X方向
有两种把Z轴放置的位置,一个是Z轴在杆和关节相同的位置,那就是改进DH,就是关节和坐标系相同,另外一个就是Z轴在下一关节位置,这样,坐标系就会比杆的序号多一,这个就是标准DH。
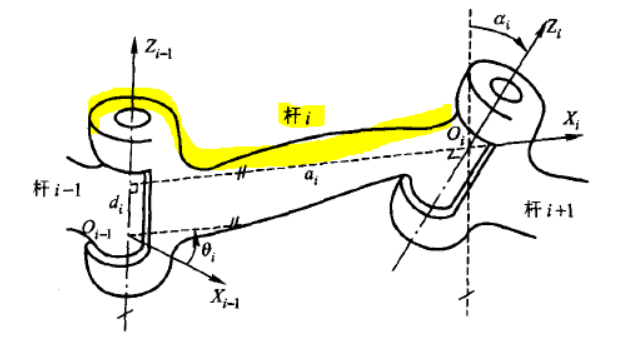
区别一:连杆坐标系建立的位置不同。SDH方法将连杆i的坐标系固定在连杆的远端,MDH方法把连杆i的坐标系固定在连杆的近端。

(a)SDH (b)MDH3.影响
对于树形结构或者闭链机构的机器人来说,按照SDH方法建立的连杆坐标系会产生歧义,因为SDH的建系原则是把连杆i的坐标系建立在连杆的远端,如图3(a)所示,这就导致连杆0上同时出现了两个坐标系。而MDH把连杆坐标系建立在每个连杆的近端,则不会坐标系重合的情况,如图3(b)所示,这就克服了SDH方法建系的缺点。
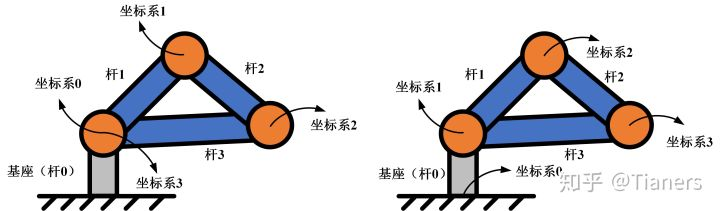
(a)SDH (b)MDH
图3 坐标系分配的不同然后我们确定X轴的方向,分情况:
1.MDH
x轴就是杆的方向,也就是MDH中的X轴就是与关节同序号,指向下一个坐标系,我们就能得到下面这个图:
2.SDH
x轴就是杆的方向,也就是SDH中的X轴就是与关节不同序号,杆的方向是X轴是由上一坐标系指过来,如下图:
确定移动顺序:
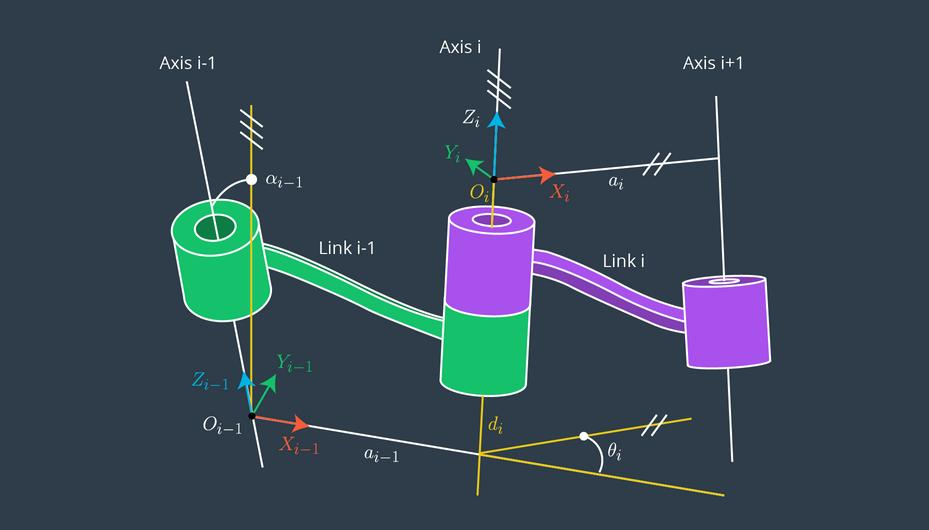
先介绍d,θ,a,α,分别是x轴之间的距离,x轴之间的角度,z轴之间的距离,z轴之间的角度- MDH
从当前坐标系移动到下一坐标系,因为初始位置就有双方z轴的信息,那就先α—>a移动到下一坐标系上,再进行θ—>d - SDH
对于SDH,因为初始位置就是有双方x轴的信息,那就四个参数相乘的顺序依次为d—>θ—>a—>α
也就是两种方法建模取决于初始位置有什么信息。
三、确定坐标系的初始位置
其实只要关注坐标系在初始位置上有没有同时拥有d和θ的信息,没有的话就是MDH。四、正向移动
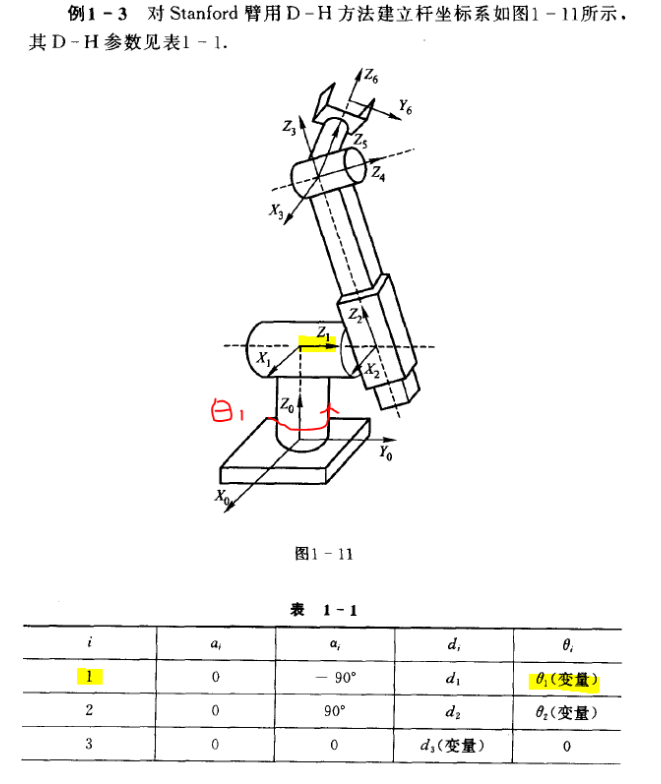
这个链接有个例子可以作为习题参考: - MDH