ros1无法一件安装
-
ubuntu20.04安装ros1 noetic出现问题
看上去是ls /opt/ros/noetic/setup.bash出了问题,求解决! -
在Ubuntu 20.04上安装ROS 1 Noetic时遇到
ls /opt/ros/noetic/setup.bash出错的问题,通常意味着ROS Noetic没有被正确安装到/opt/ros/noetic目录下。这可能是由几个不同的原因造成的,以下是一些可能的解决步骤:1. 检查ROS是否已安装
首先,确保你已经按照ROS的官方安装指南完成了所有步骤。你可以通过以下命令检查ROS是否已安装:
ls /opt/ros/如果列出的目录中没有
noetic,那么ROS可能尚未安装或安装过程中出现了问题。2. 重新安装ROS
如果ROS没有安装,或者你认为安装过程中出现了问题,可以尝试重新安装。首先,你需要添加ROS的源到你的系统(如果你还没有这么做的话),然后运行安装命令。以下是一个简化的安装过程:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt install curl # 如果你还没有安装curl curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - sudo apt update sudo apt install ros-noetic-desktop-full3. 初始化rosdep
在安装ROS之前,确保你已经初始化了rosdep:
sudo rosdep init rosdep update4. 设置环境变量
安装完成后,你需要设置ROS的环境变量。这通常在
.bashrc文件中完成:echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc但是,由于你提到
ls /opt/ros/noetic/setup.bash出错,这一步可能暂时无法执行。首先确保/opt/ros/noetic/目录存在。5. 检查安装日志
查看安装过程中的输出或日志文件,看看是否有任何错误信息可以帮助你诊断问题。
6. 使用
apt查看已安装的包使用
apt命令查看是否已安装ROS相关的包:dpkg -l | grep ros这将列出所有已安装的与ROS相关的包,检查
noetic相关的包是否已安装。7. 检查网络问题
如果你在中国或其他网络受限的地区,可能需要配置代理或使用国内的ROS镜像源来加速下载。
8. 清理并重新安装
如果上述步骤都无法解决问题,你可以尝试卸载ROS,清理所有相关文件和依赖,然后重新开始安装过程。
希望这些步骤能帮助你解决问题!如果问题依旧,请提供更详细的错误信息以便进一步分析。
以上为生成回答,仅供参考~
-
@小伊
按照步骤安装会出现以下情况 -
由于您没有具体说明是在安装什么软件或系统时遇到的问题,我只能提供一些通用的故障排除步骤和建议,这些步骤通常可以帮助解决安装过程中出现的问题:
-
检查系统要求:
- 确保您的计算机满足安装程序的系统要求(如操作系统版本、处理器类型、内存大小、硬盘空间等)。
-
以管理员身份运行:
- 尝试以管理员权限运行安装程序。在Windows上,您可以右键点击安装文件,选择“以管理员身份运行”。
-
禁用安全软件:
- 有时,防病毒软件或防火墙可能会阻止安装程序的正常运行。尝试暂时禁用这些安全软件,然后再次尝试安装。
-
检查安装文件:
- 确保下载的安装文件完整且未损坏。如果可能,重新下载文件并尝试再次安装。
-
查看错误日志:
- 安装程序通常会在安装过程中生成错误日志。查找这些日志文件,并查看其中是否有关于失败的详细信息。
-
检查磁盘空间:
- 确保您的硬盘上有足够的空间来安装程序。
-
兼容性模式:
- 如果您正在尝试在较新的系统上安装较旧的软件,尝试以兼容模式运行安装程序。在Windows上,您可以在安装文件的属性中设置兼容性模式。
-
更新操作系统和驱动程序:
- 确保您的操作系统和所有相关驱动程序都是最新的。有时,旧的系统或驱动程序可能与新软件不兼容。
-
查看官方文档和社区:
- 访问软件的官方网站,查看是否有关于安装的常见问题解答或指导。此外,还可以搜索相关的论坛和社区,看看其他用户是否遇到了类似的问题,并找到了解决方案。
-
联系技术支持:
- 如果上述步骤都无法解决问题,您可以考虑联系软件的技术支持团队,向他们报告问题并寻求帮助。
如果您能提供更具体的错误消息或安装过程中的具体情况,我可以给出更具体的建议。
以上为生成回答,仅供参考~
-
-
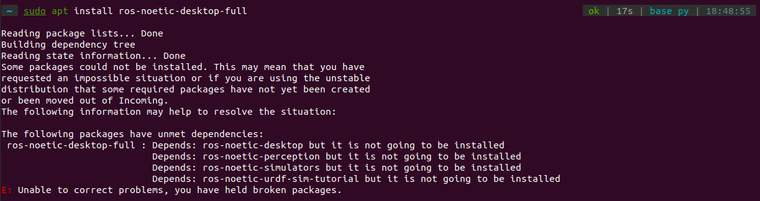
@小伊 ~ sudo apt install ros-noetic-desktop-full ok | 17s | base py | 18:48:55
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:The following packages have unmet dependencies:
ros-noetic-desktop-full : Depends: ros-noetic-desktop but it is not going to be installed
Depends: ros-noetic-perception but it is not going to be installed
Depends: ros-noetic-simulators but it is not going to be installed
Depends: ros-noetic-urdf-sim-tutorial but it is not going to be installed
E: Unable to correct problems, you have held broken packages. -
这个错误信息表明你尝试安装的
ros-noetic-desktop-full包依赖于其他一些未安装的 ROS Noetic 包,如ros-noetic-desktop、ros-noetic-perception、ros-noetic-simulators和ros-noetic-urdf-sim-tutorial。此外,还提示你有一些被“hold”的或损坏的包,这可能导致依赖问题无法被解决。要解决这个问题,你可以尝试以下几个步骤:
-
更新你的包列表和升级所有已安装的包:
打开终端,运行以下命令来更新你的包列表并尝试升级所有已安装的包,这有时可以解决依赖问题:sudo apt update sudo apt upgrade -
检查并修复损坏的包:
使用以下命令来检查哪些包被标记为“hold”,并尝试修复它们:apt-mark showhold # 如果有包被hold,使用下面的命令取消hold(替换<package-name>为实际的包名) sudo apt-mark unhold <package-name>但在这个案例中,你可能不需要直接取消任何包的hold,因为错误更可能是由于依赖问题而不是包被hold。
-
安装缺失的依赖包:
由于错误信息已经明确指出了哪些包未安装,你可以尝试直接安装这些包:sudo apt install ros-noetic-desktop ros-noetic-perception ros-noetic-simulators ros-noetic-urdf-sim-tutorial安装这些包后,再次尝试安装
ros-noetic-desktop-full。 -
使用aptitude(如果apt不能解决问题):
有时,aptitude可以更智能地处理复杂的依赖问题。你可以尝试使用aptitude来安装 ROS:sudo apt install aptitude sudo aptitude install ros-noetic-desktop-full在
aptitude的安装过程中,它可能会给你一些选项来解决依赖冲突,你可以按照提示操作。 -
检查你的软件源:
确保你的/etc/apt/sources.list和/etc/apt/sources.list.d/目录下的文件包含了正确的 ROS Noetic 的软件源。你可以从 ROS 的官方网站找到正确的软件源列表。 -
清理并重新配置:
如果以上步骤都不能解决问题,你可以尝试清理你的 apt 缓存并重新配置你的包管理器:sudo apt clean sudo apt autoclean sudo apt autoremove sudo dpkg --configure -a
执行这些步骤后,再次尝试安装
ros-noetic-desktop-full。如果问题仍然存在,可能需要更详细地检查你的系统配置或寻求 ROS 社区的帮助。
以上为生成回答,仅供参考~
-
-
@小伊 还是无法解决,以下是详细日志:
~ sudo apt update 100 err | base py | 18:49:01Hit:1 http://mirrors.ustc.edu.cn/ubuntu focal InRelease
Ign:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal InRelease
Hit:3 http://mirrors.ustc.edu.cn/ubuntu focal-updates InRelease
Hit:4 http://mirrors.ustc.edu.cn/ubuntu focal-backports InRelease
Hit:5 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu focal InRelease
Hit:6 http://mirrors.ustc.edu.cn/ubuntu focal-security InRelease
Hit:7 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal Release
Hit:9 http://packages.ros.org/ros/ubuntu focal InRelease
Reading package lists... Done
Building dependency tree
Reading state information... Done
All packages are up to date.~ sudo apt upgrade ok | base py | 18:52:01
Reading package lists... Done
Building dependency tree
Reading state information... Done
Calculating upgrade... DonePatches available for packages affected by CUPS Remote Code Execution issue
tracked by CVE-2024-47076, CVE-2024-47175, CVE-2024-47176, and CVE-2024-47177
For more see: https://ubuntu.com/blog/cups-remote-code-execution
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
~ apt-mark showhold ok | base py | 18:52:06
~ sudo apt install ros-noetic-desktop ros-noetic-perception ros-noetic-simulators ros-noetic-urdf-sim-tutorial
Reading package lists... Done
Building dependency tree
Reading state information... Done
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:The following packages have unmet dependencies:
ros-noetic-desktop : Depends: ros-noetic-common-tutorials but it is not going to be installed
Depends: ros-noetic-geometry-tutorials but it is not going to be installed
Depends: ros-noetic-robot but it is not going to be installed
Depends: ros-noetic-urdf-tutorial but it is not going to be installed
Depends: ros-noetic-visualization-tutorials but it is not going to be installed
Depends: ros-noetic-viz but it is not going to be installed
ros-noetic-perception : Depends: ros-noetic-image-common but it is not going to be installed
Depends: ros-noetic-image-pipeline but it is not going to be installed
Depends: ros-noetic-image-transport-plugins but it is not going to be installed
Depends: ros-noetic-laser-pipeline but it is not going to be installed
Depends: ros-noetic-perception-pcl but it is not going to be installed
Depends: ros-noetic-ros-base but it is not going to be installed
ros-noetic-simulators : Depends: ros-noetic-gazebo-ros-pkgs but it is not going to be installed
Depends: ros-noetic-robot but it is not going to be installed
Depends: ros-noetic-rqt-common-plugins but it is not going to be installed
Depends: ros-noetic-rqt-robot-plugins but it is not going to be installed
Depends: ros-noetic-stage-ros but it is not going to be installed
ros-noetic-urdf-sim-tutorial : Depends: ros-noetic-controller-manager but it is not going to be installed
Depends: ros-noetic-diff-drive-controller but it is not going to be installed
Depends: ros-noetic-gazebo-ros but it is not going to be installed
Depends: ros-noetic-gazebo-ros-control but it is not going to be installed
Depends: ros-noetic-robot-state-publisher but it is not going to be installed
Depends: ros-noetic-rqt-robot-steering but it is not going to be installed
Depends: ros-noetic-rviz but it is not going to be installed
Depends: ros-noetic-urdf-tutorial but it is not going to be installed
E: Unable to correct problems, you have held broken packages.!w /etc/apt ls ok | base py | 18:53:39
apt.conf.d auth.conf.d preferences.d sources.list sources.list.d sources.list.save trusted.gpg trusted.gpg.d!w /etc/apt cd sources.list.d ok | base py | 18:53:40
!w /etc/apt/sources.list.d ls ok | base py | 18:53:50
ros-fish.list ros-latest.list!w /etc/apt vim sources.list
deb http://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse -
从你提供的日志来看,你在尝试安装 ROS Noetic 版本的一些包时遇到了依赖问题。这通常是因为缺少了一些必要的依赖包或者源列表中没有包含所有必要的软件仓库。以下是一些可能的解决步骤:
-
确保 ROS Noetic 的仓库已经添加:
你的/etc/apt/sources.list.d/目录下只列出了两个与 ROS 相关的列表(ros-fish.list和ros-latest.list),但这两个列表可能不包含 Noetic 版本的所有包。你需要确保你已经添加了 Noetic 的仓库。通常,你可以通过运行以下命令来添加 ROS Noetic 的仓库(如果你还没有添加的话):sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt update sudo apt install python3-rosdep python3-rosinstall python3-vcstools sudo rosdep init rosdep update注意:如果你已经有了
ros-latest.list并且它是为 Noetic 设置的,那么你可能不需要再次运行这些命令。 -
安装依赖包:
从错误日志来看,你需要安装许多缺失的依赖包。你可以尝试逐个安装这些依赖,或者一次性安装所有缺失的依赖(如果apt允许的话)。例如:sudo apt install ros-noetic-common-tutorials ros-noetic-geometry-tutorials ros-noetic-robot ...这里省略了所有其他依赖,但你应该在命令中包含所有列出的依赖。
-
使用
apt-get的-f选项:
如果你不确定哪些包是缺失的,或者apt报告有损坏的包,你可以尝试使用apt-get的-f(fix-broken)选项来尝试自动修复:sudo apt-get install -f然后再次尝试安装你的 ROS 包。
-
检查你的 ROS 版本:
确保你正在尝试安装的 ROS 版本(在这个例子中是 Noetic)与你的 Ubuntu 版本(focal,即 Ubuntu 20.04)兼容。 -
检查网络连接:
确保你的网络连接稳定,以便apt可以从远程仓库下载所有必要的包。 -
清理旧的包:
有时候,旧的或冲突的包可能会阻止你安装新的包。你可以尝试清理这些包:sudo apt autoremove sudo apt autoclean
按照这些步骤操作后,你应该能够解决依赖问题并成功安装 ROS Noetic。如果问题仍然存在,请检查是否有任何特定的错误信息或警告,这可能会提供更多关于问题的线索。
以上为生成回答,仅供参考~
-
-
@小伊 在 ros1无法一件安装 中说:
sudo rosdep init
在运行这一步时会出现网络问题:
!w /etc/apt sudo rosdep init ok | 51s | base py | 18:58:19
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
<urlopen error <urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list)> -
当你在尝试使用
sudo rosdep init命令初始化 ROS 依赖管理时遇到网络问题,这通常是因为你的网络连接无法直接访问 GitHub 的 raw.githubusercontent.com 服务器。这个问题可能由多种原因引起,包括网络配置、防火墙设置或代理设置等。以下是一些解决此问题的建议步骤:1. 检查网络连接
首先,确保你的设备可以访问互联网,特别是可以访问 GitHub 的 raw.githubusercontent.com。你可以尝试在浏览器中访问该 URL 看是否能正常加载。
2. 临时使用 VPN 或更换网络环境
如果你在一个受限的网络环境中(如学校、公司网络),尝试切换到另一个网络环境或使用 VPN 来绕过可能的网络限制。
3. 配置 HTTP/HTTPS 代理
如果你的网络环境需要通过代理服务器才能访问外部网络,你需要配置 ROS 以使用这些代理。这可以通过设置环境变量
http_proxy和https_proxy来实现。例如,在你的终端中设置:export http_proxy=http://your.proxy.server:port export https_proxy=https://your.proxy.server:port然后再次尝试运行
sudo rosdep init。注意,你可能需要根据你的代理服务器设置调整上述命令中的your.proxy.server和port。4. 手动下载并设置 sources.list
如果上述方法都不可行,你可以尝试手动下载
sources.list文件,并将其放置到正确的位置。首先,你需要下载文件:wget https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list然后,将下载的文件移动到 ROS 依赖管理器能够找到的位置。这通常意味着你需要将其复制到
/etc/ros/rosdep/sources.list.d/目录下(如果目录不存在,你可能需要先创建它):sudo mkdir -p /etc/ros/rosdep/sources.list.d/ sudo cp 20-default.list /etc/ros/rosdep/sources.list.d/之后,运行
rosdep update来更新本地数据库:sudo rosdep update5. 检查 ROS 版本和依赖
确保你安装的 ROS 版本与你的 Ubuntu 版本兼容,并且所有依赖都已正确安装。
6. 查看 ROS 社区和文档
如果问题依旧存在,查看 ROS 社区论坛或官方文档可能会提供更多帮助。
通过以上步骤,你应该能够解决在使用
sudo rosdep init时遇到的网络问题。如果问题仍然存在,请考虑检查你的网络设置或联系你的网络管理员。
以上为生成回答,仅供参考~
-
兄弟,这个问题解决没有?我跟你遇到了相同的问题。求解决方法
-
@xiaoxin10192022
我也遇到了一样的问题,现在已经安装好了。
当提示:
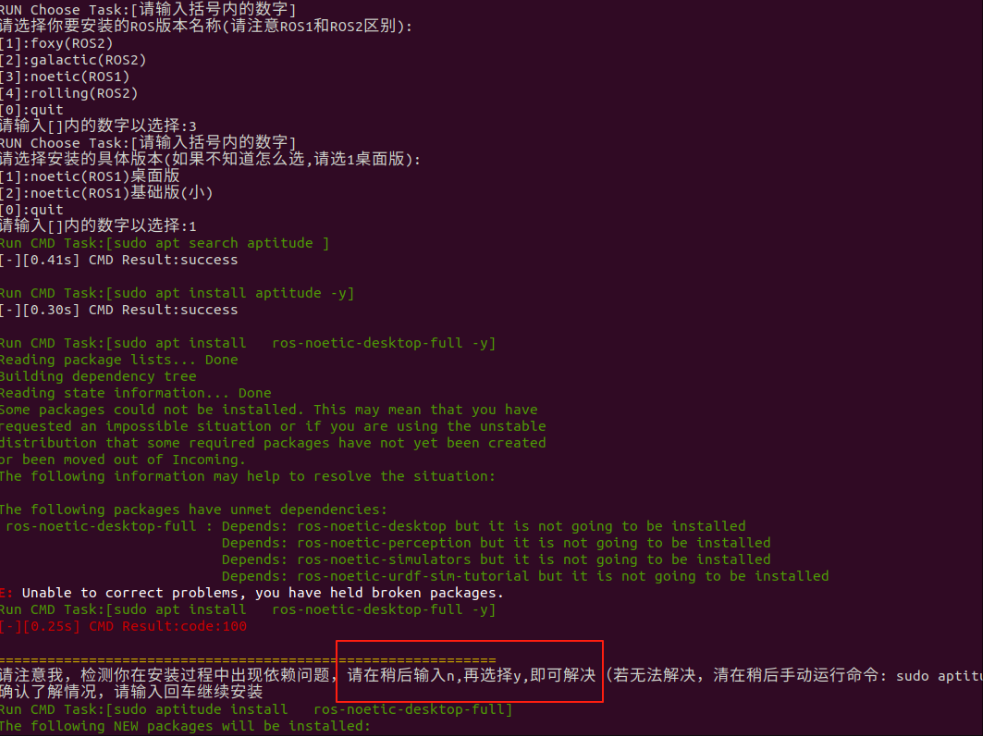
这一步应该要按两次no再按两次yes。我自己是手动运行sudo aptitude install ros-noetic-desktop-full命令的时候,尝试了很多次yes no,最后nnyy成功装上的。小乌龟很好玩。