雷达建图漂移
-
标题:雷达建图漂移
背景(可选):
想完成雷达建图
问题描述:
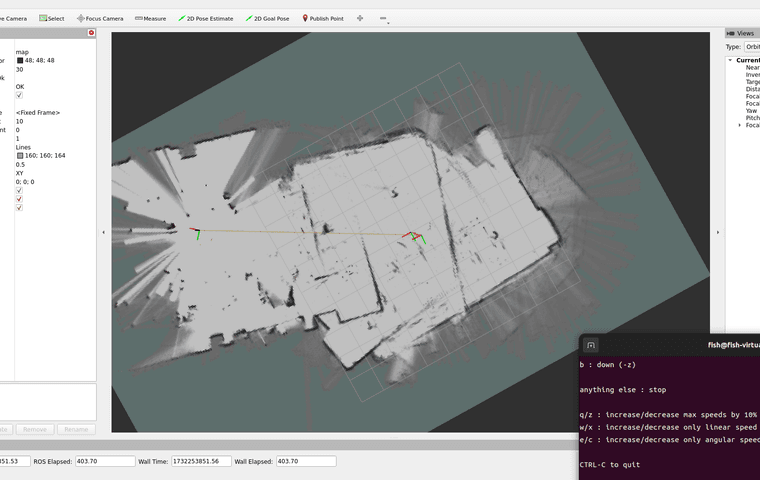
启动建图后,RVIZ中的地图老是会漂移
具体细节和上下文:
如图
尝试过的解决方法:
在CSDN查了一下,问题原因有很多,我无法确定是什么问题,有可能是陀螺仪飘了,但我也不知道怎么纠正
-
雷达建图漂移是一个常见的问题,可能由多种因素导致。以下是一些可能的原因及相应的解决方法:
可能的原因
-
陀螺仪(IMU)数据异常:
- 陀螺仪负责提供机器人的姿态和角速度信息,如果其数据不准确或存在噪声,可能导致地图漂移。
-
激光雷达数据异常:
- 激光雷达是建图过程中的关键传感器,如果其数据传入异常或扫描频率设置不当,也可能导致地图漂移。
-
里程计数据异常:
- 里程计提供机器人的位置和运动信息,如果里程计数据异常,如编码器误差、轮子打滑等,会导致建图时的定位不准确。
-
计算机配置问题:
- 如果计算机配置较低,可能在处理大量传感器数据时出现卡顿或延迟,进而影响建图精度。
-
SLAM算法参数设置不当:
- SLAM算法如gmapping、Cartographer等的参数设置对建图效果有直接影响,如果参数设置不当,可能导致地图漂移。
-
TF树配置错误:
- TF(Transform)树用于管理不同坐标系之间的转换关系,如果TF树配置错误,会导致坐标系之间的转换不正确,进而影响导航和建图。
解决方法
-
检查并校准陀螺仪:
- 确保陀螺仪的数据准确可靠,可以通过对比其他传感器数据或使用专门的校准工具进行校准。
-
检查激光雷达数据:
- 检查激光雷达的扫描频率和数据传入速率是否设置合理,确保数据质量良好。
-
校准里程计:
- 对里程计进行校准,确保其数据准确反映机器人的实际运动情况。
-
优化计算机配置:
- 如果计算机配置较低,可以尝试降低SLAM算法的配置参数,如地图分辨率等,以减轻计算机的计算压力。
-
调整SLAM算法参数:
- 根据实际情况调整SLAM算法的参数,如激光雷达的扫描范围、位姿图优化的参数等。
-
检查TF树配置:
- 使用tf_monitor工具检查TF树的发布正确性和延迟,确保所有坐标系的关系正确。
-
结合多传感器数据融合:
- 考虑使用激光雷达、视觉传感器等多种传感器进行数据融合,以提高地图构建的准确性和稳定性。
-
记录并分析日志:
- 记录ROS系统的运行日志,分析其中可能存在的错误信息或异常数据,以便进一步定位问题。
综上所述,雷达建图漂移问题可能由多种因素导致,需要综合考虑传感器数据、计算机配置、SLAM算法参数以及TF树配置等多个方面。通过逐一排查并采取相应的解决方法,可以有效解决地图漂移问题。
以上为生成回答,仅供参考~
-
-
@小鱼 求助,帮我看看这是什么问题,昨天建图都还好好的
-
@XR_ROS 兄弟你这咋解决的