我的ros小车和电脑都连接上了我买回来没多久的路由器,但是好像还是没法通信
-


-
当您的ROS小车和电脑都已经连接上了新买的路由器,但无法实现通信时,可能涉及多个方面的问题。以下是一些排查和解决问题的步骤:
一、检查网络连接
-
确认连接状态:
- 确保ROS小车和电脑都已经正确连接到路由器,并且可以通过路由器访问互联网(如果路由器可以连接互联网)。
- 在ROS小车和电脑上分别运行网络诊断工具,检查网络连接状态。
-
检查IP地址:
- 确认ROS小车和电脑在同一个局域网内,即它们的IP地址应该在同一个子网内。
- 可以通过在ROS小车和电脑上分别运行
ifconfig或ip addr命令来查看IP地址。
二、ROS配置检查
-
ROS_MASTER_URI:
- 确保ROS小车和电脑上都设置了正确的
ROS_MASTER_URI。这通常是ROS主机的IP地址和端口号(默认为11311)。 - 例如,如果ROS主机(可能是小车上的树莓派或工控机)的IP地址是192.168.1.100,则应在从机(电脑)上设置
export ROS_MASTER_URI=http://192.168.1.100:11311。
- 确保ROS小车和电脑上都设置了正确的
-
ROS_HOSTNAME和ROS_IP:
ROS_HOSTNAME应该设置为主机名(如果适用),而ROS_IP应该设置为ROS节点或工具的公开IP地址。- 如果同时设置了
ROS_HOSTNAME和ROS_IP,则ROS_HOSTNAME会优先使用。 - 在大多数情况下,为了简化配置,可以只设置
ROS_IP。
-
.bashrc文件:
- 确保在ROS小车和电脑的
.bashrc文件中都正确设置了上述环境变量。 - 运行
source ~/.bashrc命令以应用更改。
- 确保在ROS小车和电脑的
三、防火墙和安全设置
-
检查防火墙状态:
- 确保ROS小车和电脑上的防火墙没有阻止ROS通信所需的端口(默认为11311)。
- 可以暂时关闭防火墙以测试是否是防火墙导致的问题。
-
检查安全软件:
- 确保没有安全软件(如杀毒软件)阻止ROS通信。
四、其他可能的问题
-
路由器设置:
- 确保路由器没有设置任何会阻止ROS通信的规则或策略。
- 检查路由器的DHCP服务是否正常工作,确保ROS小车和电脑都能获得有效的IP地址。
-
ROS版本兼容性:
- 确保ROS小车和电脑上安装的ROS版本是兼容的。
-
硬件问题:
- 检查ROS小车和电脑之间的网络连接硬件(如网线、无线网卡等)是否正常工作。
五、调试步骤
-
ping测试:
- 在ROS小车和电脑上分别ping对方的IP地址,以确认它们之间是否可以相互通信。
-
roscore和rostopic:
- 在ROS主机上运行
roscore。 - 在从机上运行
rostopic list来查看是否可以列出ROS主机上的主题。
- 在ROS主机上运行
-
查看日志:
- 检查ROS小车和电脑上的ROS日志,以获取有关通信失败的更多信息。
通过以上步骤,您应该能够诊断并解决ROS小车和电脑之间无法通信的问题。如果问题仍然存在,可能需要更详细地检查网络配置或咨询ROS社区以获取更多帮助。
以上为生成回答,仅供参考~
-
-
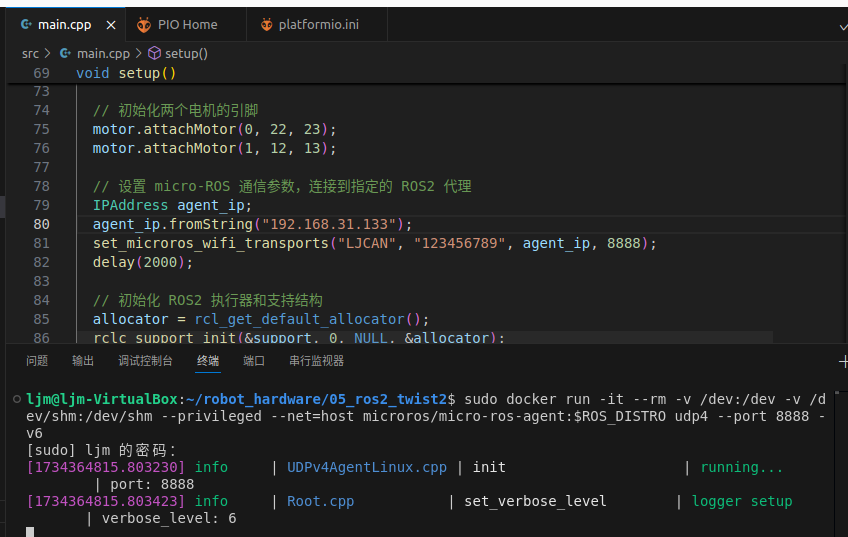
@2455409508 那个ip不知道填写什么
-
@2455409508 先走一遍快速上手教程,打通一下网络