6.44,仿真机器人 原地空转,不前进,怎么解决
-
 图片地址)
图片地址)
-
针对仿真机器人原地空转、不前进的问题,以下是一些可能的解决方案:
一、检查电池电量
- 确认电量:首先,检查机器人的电池电量是否充足。如果电量不足,机器人可能无法提供足够的动力来前进。
- 充电或更换电池:如果电量不足,及时给机器人充电或更换新电池。
二、检查传感器状态
- 清洁传感器:传感器可能被灰尘或污垢覆盖,导致无法正确感知周围环境。使用软布擦拭传感器,确保其表面清洁。
- 检查传感器功能:如果传感器已损坏或出现故障,机器人可能无法正确导航。检查传感器是否正常工作,如有需要,进行更换或修复。
三、检查驱动轮状态
- 清理异物:检查驱动轮是否被异物卡住或阻塞。如有异物,及时清理。
- 检查轮子磨损:长时间使用后,驱动轮可能磨损严重,影响机器人的移动能力。检查驱动轮的磨损情况,如有需要,进行更换。
四、检查控制系统
- 检查电路板和连接线路:控制系统负责机器人的导航和移动,如果电路板或连接线路出现故障,机器人可能无法正常工作。检查电路板和连接线路是否正常,如有损坏,进行更换或修复。
- 软件更新或重装:如果控制系统软件出现问题,也可能导致机器人原地打转。尝试更新或重装软件,以解决可能存在的程序错误。
五、检查外部环境
- 地面条件:检查机器人所处的地面是否平整、干燥。如果地面湿滑或不平整,机器人可能无法稳定前进。
- 障碍物:确保机器人前进路径上没有障碍物阻挡。
六、其他注意事项
- 定期检查和维护:定期对机器人进行检查和维护,确保其处于良好状态。
- 合理使用:避免过度使用或不当使用机器人,以防给机器人带来额外的负担。
- 专业维修:如果以上步骤都无法解决问题,建议寻求专业的维修服务。专业的维修人员可以对机器人进行全面检查,并找出问题的根本原因。
综上所述,针对仿真机器人原地空转、不前进的问题,可以从电池电量、传感器状态、驱动轮状态、控制系统、外部环境等多个方面进行检查和修复。如果问题依然存在,建议寻求专业维修服务。
以上为生成回答,仅供参考~
-
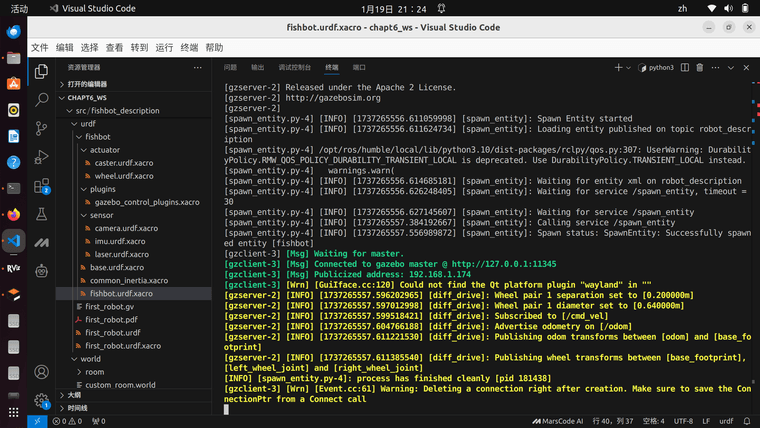
重点检查下小车的惯性矩阵相关设置值
我之前遇到过相关值设置的不对,小车出现倾斜并绕自身中心轴旋转
环境为ubuntu16.04 + ros kinetic
自己通过xacro搭建的2个驱动轮,2个万向随动轮的小车注意,惯性矩阵最好用一个单独的xacro,然后通过
<xacro:include filename="inertial_matrix_algorithm.xacro" />
进行调用mrobot.xacro如下:
<robot name="mrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="inertial_matrix_algorithm.xacro" /> <xacro:include filename="base.xacro" /> <xacro:include filename="camera.xacro" /> <xacro:include filename="laser.xacro" /></robot>
惯性矩阵 计算xacro文件如下:
<robot name="inertial_matrix_algorithm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="sphere_inertial_matrix" params="m r"> <inertial> <mass value="${m}" /> <inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0" iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" /> </inertial> </xacro:macro> <xacro:macro name="cylinder_inertial_matrix" params="m r l"> <inertial> <mass value="${m}" /> <inertia ixx="${m*(3*r*r+l*l)/12}" ixy="0" ixz="0" iyy="${m*(3*r*r+l*l)/12}" iyz="0" izz="${m*r*r/2}" /> </inertial> </xacro:macro> <xacro:macro name="box_inertial_matrix" params="m l w h"> <inertial> <mass value="${m}" /> <inertia ixx="${m*(h*h + l*l)/12}" ixy="0" ixz="0" iyy="${m*(w*w + l*l)/12}" iyz="0" izz="${m*(w*w + h*h)/12}" /> </inertial> </xacro:macro></robot>