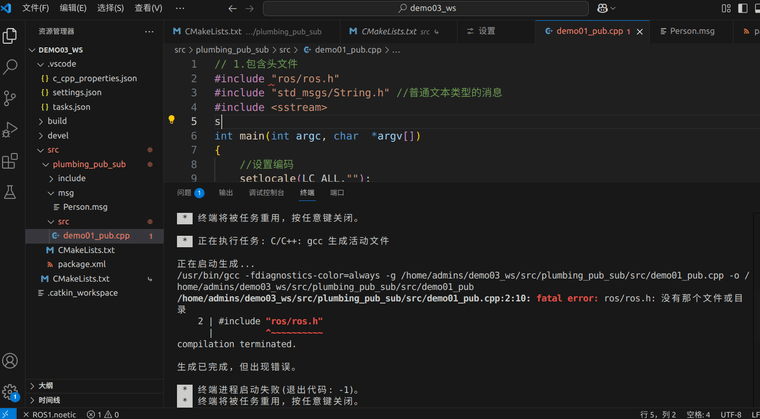
VScode 中: include "ros/ros.h"报错
-
//问题:
VScode 中:
include "ros/ros.h"报错//背景:
1.鱼香ros一键下载的ros1
2.ubuntu20.04
3.虚拟机vmware//目前尝试的方法:
1.下载cpp,ros插件
2.保存文件
3.更改了includePath
4.重启了vscode
5.功能包拼写问题
6.检查ros变量是否正确加载
7.检查CMakList.txt
但是上列方法都没有用,求大佬指点 -
在 VSCode 中遇到
#include "ros/ros.h"报错的问题,通常是由于编译器无法找到 ROS 的头文件路径。这里有几个步骤可以帮助你解决这个问题:-
确认 ROS 环境是否设置正确:
确保你的 ROS 环境已经正确设置。在终端中运行echo $ROS_PACKAGE_PATH和source /opt/ros/noetic/setup.bash(假设你安装的是 Noetic 版本,路径可能有所不同),然后再次检查echo $ROS_PACKAGE_PATH是否包含了你的工作空间路径。 -
检查 VSCode 的 C/C++ 插件配置:
VSCode 使用 Microsoft 的 C/C++ 插件来处理 C++ 代码。你需要确保这个插件的配置中包含了 ROS 的头文件路径。这通常在c_cpp_properties.json文件中设置。- 打开 VSCode,然后按
Ctrl+Shift+P调出命令面板,输入C/C++: Edit Configurations (UI)并选择它。 - 在打开的界面中,找到
Include Path部分,确保其中包含了类似/opt/ros/noetic/include的路径(具体路径根据你的 ROS 安装位置而定)。
- 打开 VSCode,然后按
-
检查 CMakeLists.txt:
确保你的 CMakeLists.txt 文件正确设置了find_package(catkin REQUIRED COMPONENTS roscpp ...),并且catkin_package()被正确调用。此外,确保你的源文件被正确地添加到add_executable或add_library指令中。 -
重新生成工作空间:
在 ROS 工作空间的根目录下,运行catkin_make或catkin build来重新生成你的工作空间。这可以确保所有的构建文件都是最新的,并且包含正确的路径信息。 -
重启 VSCode:
有时候,更改环境变量或插件配置后需要重启 VSCode 才能使更改生效。 -
检查源代码文件的位置:
确保你的源代码文件位于 ROS 工作空间内的某个包的src文件夹中。如果文件位置不正确,可能会导致编译器找不到 ROS 的头文件。 -
使用终端进行编译和测试:
尝试在终端中编译和运行你的 ROS 节点,看看是否有相同的错误。这可以帮助确定问题是否与 VSCode 或其插件相关,还是与 ROS 环境设置有关。
如果以上步骤都不能解决问题,可能需要更详细地检查你的 ROS 安装、VSCode 配置以及工作空间的结构。你也可以考虑查看 VSCode 的输出或调试控制台,看看是否有更具体的错误信息。
以上为生成回答,仅供参考~
-