运行雷达驱动时报错无法获取雷达健康状态导致运行终止
-
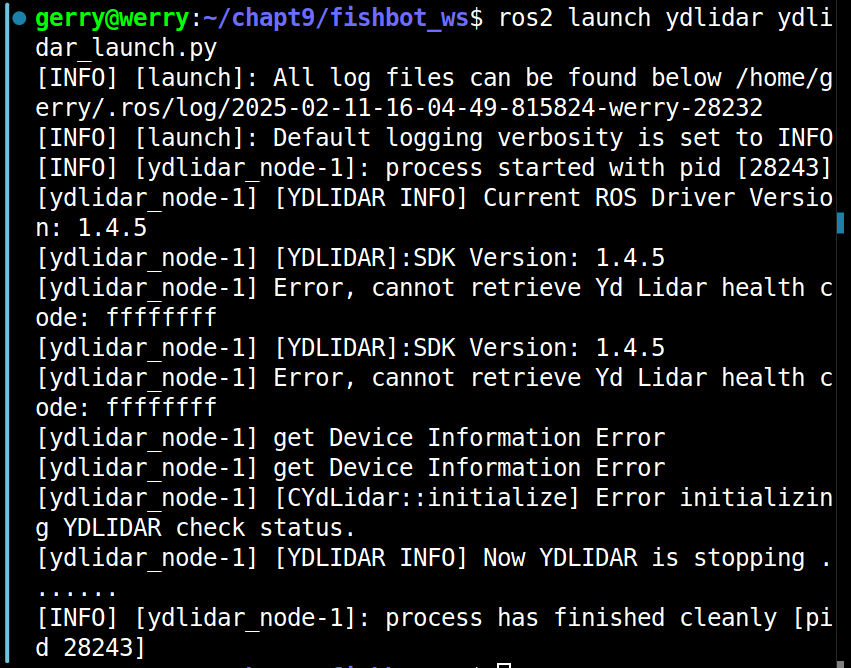
运行雷达驱动时,第一次好用,之后就出现 “Error, cannot retrieve Yd Lidar health code: ffffffff“,然后停止的现象,试了很多次都没好,如下图:
但在终端nc -l 8889是有数据的:
有没有人知道该怎么解决

-
@Gerry

解决了,将.yaml文件里的端口正确配置就好了

-
针对运行雷达驱动时出现的“Error, cannot retrieve Yd Lidar health code: ffffffff”错误,并导致运行终止的问题,可以尝试以下步骤进行排查和解决:
-
检查雷达硬件连接:
- 确保雷达与计算机之间的连接稳定且正确。
- 检查所有连接线是否插紧,无松动或损坏。
-
重启雷达和驱动:
- 尝试先关闭雷达和雷达驱动程序,然后重新启动,看是否能恢复正常。
-
检查雷达驱动设置:
- 确认雷达驱动的设置与雷达型号和规格相匹配。
- 检查是否有任何配置错误或不一致的地方。
-
检查雷达健康状态接口:
- 由于错误信息中提到了无法获取雷达健康状态,可以检查雷达是否提供了健康状态查询的接口,并确保该接口没有被阻塞或损坏。
- 可以通过查阅雷达的技术文档或联系雷达制造商的技术支持来获取更多信息。
-
查看日志文件:
- 检查雷达驱动和相关软件的日志文件,看是否有更详细的错误信息或警告。
- 这些日志可能包含有关错误原因的有用信息。
-
更新雷达驱动程序:
- 尝试更新雷达驱动程序到最新版本,以确保其与操作系统和雷达硬件兼容。
-
检查网络设置(如果适用):
- 如果雷达是通过网络连接的,请检查网络连接是否稳定,以及网络设置是否正确。
- 可以通过ping或其他网络诊断工具来测试网络连接。
-
联系技术支持:
- 如果以上步骤都无法解决问题,建议联系雷达制造商的技术支持团队,寻求专业的帮助和指导。
此外,您提到在终端使用
nc -l 8889时有数据输出,这表明雷达可能正在发送数据到该端口。然而,这并不意味着雷达的健康状态接口也正常工作。因此,还需要专门针对健康状态接口进行排查。综上所述,解决此问题可能需要从硬件连接、驱动设置、网络接口等多个方面进行排查。希望这些步骤能帮助您解决问题。如果问题依然存在,请尽快联系专业技术支持以获取进一步帮助。
以上为生成回答,仅供参考~
-
-
@Gerry
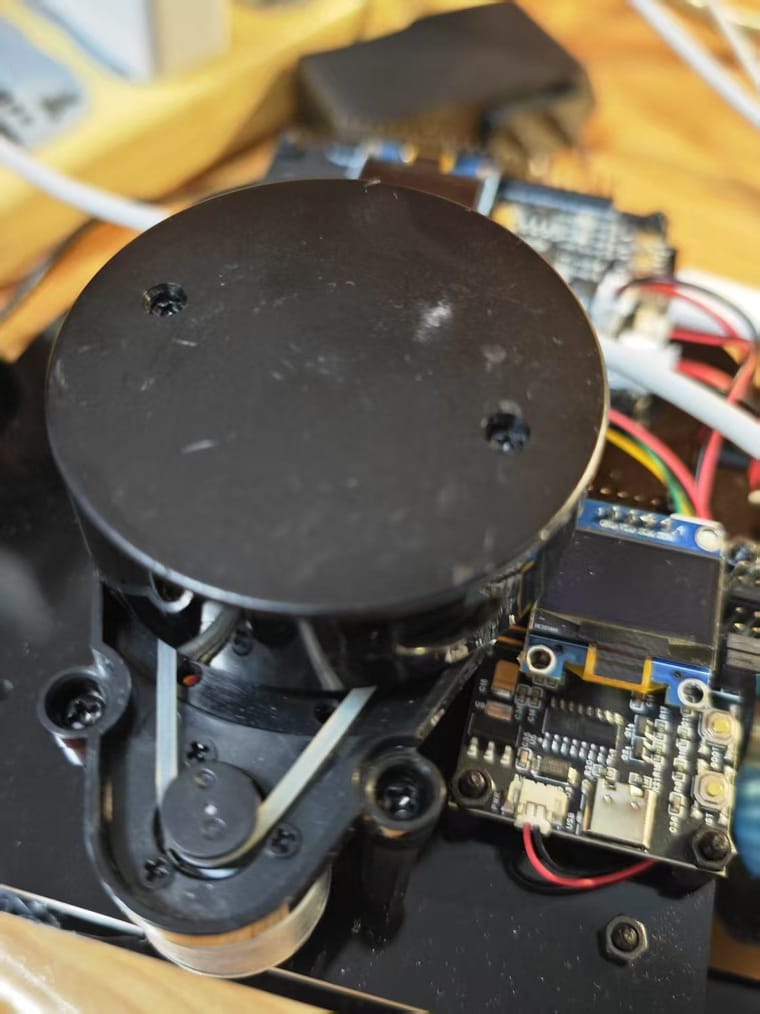
我又将雷达驱动重新下载了,这把倒是启动成功了,但是报错 Failed to turn on the Lidar, because the lidar is [Device Tremble]., 如下图:
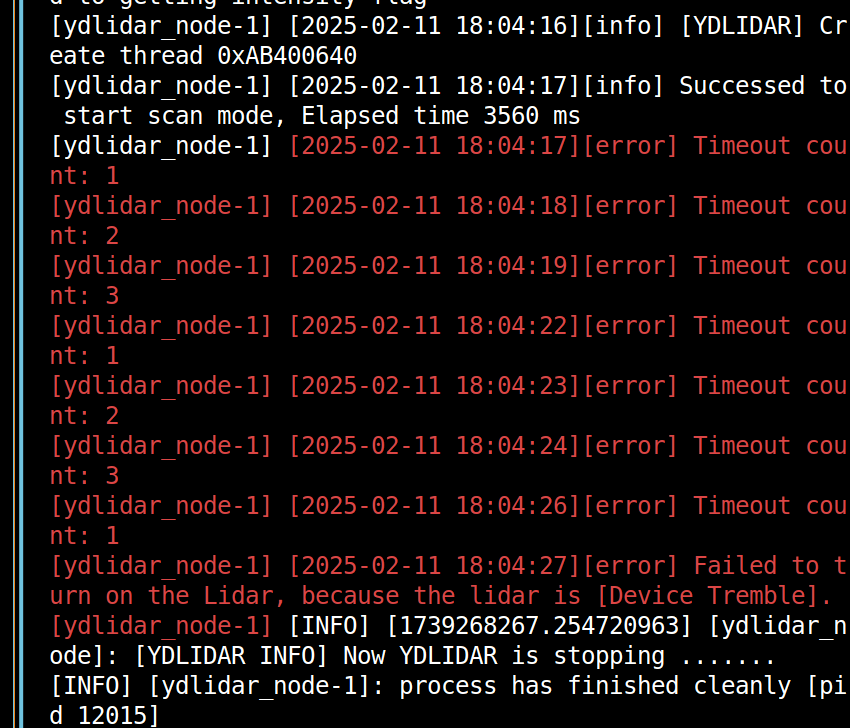
以下是完整报错:
gerry@werry:~/chapt9/fishbot_ws$ ros2 launch ydlidar ydlidar_launch.py [INFO] [launch]: All log files can be found below /home/gerry/.ros/log/2025-02-11-18-04-13-381488-werry-12004 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [ydlidar_node-1]: process started with pid [12015] [ydlidar_node-1] [INFO] [1739268253.456460789] [ydlidar_node]: [YDLIDAR INFO] Current ROS Driver Version: 1.0.1 [ydlidar_node-1] [ydlidar_node-1] [2025-02-11 18:04:13][info] SDK initializing [ydlidar_node-1] [2025-02-11 18:04:13][info] SDK has been initialized [ydlidar_node-1] [2025-02-11 18:04:13][info] SDK Version: 1.2.9 [ydlidar_node-1] [2025-02-11 18:04:13][info] Connect elapsed time 22 ms [ydlidar_node-1] [2025-02-11 18:04:13][info] Lidar successfully connected [/dev/ttyUSB0:115200] [ydlidar_node-1] [2025-02-11 18:04:13][info] Lidar running correctly! The health status good [ydlidar_node-1] [2025-02-11 18:04:13][info] Current Lidar Model Code 12 [ydlidar_node-1] [2025-02-11 18:04:13][info] Check status, Elapsed time 0 ms [ydlidar_node-1] [2025-02-11 18:04:13][info] Lidar init success, Elapsed time [22]ms [ydlidar_node-1] [2025-02-11 18:04:14][info] Start to getting intensity flag [ydlidar_node-1] [2025-02-11 18:04:16][info] [YDLIDAR] End to getting intensity flag [ydlidar_node-1] [2025-02-11 18:04:16][info] [YDLIDAR] Create thread 0xAB400640 [ydlidar_node-1] [2025-02-11 18:04:17][info] Successed to start scan mode, Elapsed time 3560 ms [ydlidar_node-1] [2025-02-11 18:04:17][error] Timeout count: 1 [ydlidar_node-1] [2025-02-11 18:04:18][error] Timeout count: 2 [ydlidar_node-1] [2025-02-11 18:04:19][error] Timeout count: 3 [ydlidar_node-1] [2025-02-11 18:04:22][error] Timeout count: 1 [ydlidar_node-1] [2025-02-11 18:04:23][error] Timeout count: 2 [ydlidar_node-1] [2025-02-11 18:04:24][error] Timeout count: 3 [ydlidar_node-1] [2025-02-11 18:04:26][error] Timeout count: 1 [ydlidar_node-1] [2025-02-11 18:04:27][error] Failed to turn on the Lidar, because the lidar is [Device Tremble]. [ydlidar_node-1] [INFO] [1739268267.254720963] [ydlidar_node]: [YDLIDAR INFO] Now YDLIDAR is stopping ....... [INFO] [ydlidar_node-1]: process has finished cleanly [pid 12015] [ydlidar_node-1]报错中提到的【Device Tremble】,是的确存在的,因为我买的是9成新雷达套餐,运过来时外壳就有变形,旋转的时候的确会明显抖动,不知道是不是因为这个原因导致无法获取数据
@小鱼
-
@Gerry
不对阿,应该不是雷达坏了,现在跑docker的那个示例建图程序能跑通啊,唉我再看看吧


-
@Gerry
解决了,将.yaml文件里的端口正确配置就好了 -
G Gerry 将这个主题标记为已解决,在
-
@Gerry
不对应该是 看这个:

看是具体映射到哪个端口就将port改为那个端口 -
@Gerry 在第7章的教程里面,docker 环境雷达驱动 也遇到类似的问题,选择1 wifi测试可以收到接收到客户端的连接信息,然后选择2 雷达驱动 也是可以接收到客户端的连接信息,之后 就是timeout,请问您这边解决了 怎么解决的。
-
@1227303535 具体报错是什么啊?一步步按照教程https://fishros.org.cn/forum/topic/940/fishbot%E6%95%99%E7%A8%8B-9-0-5-%E9%9B%B7%E8%BE%BE%E5%9B%BA%E4%BB%B6%E7%83%A7%E5%BD%95%E5%8F%8A%E9%85%8D%E7%BD%AE烧录配置完成应该没问题阿,是不是你网络不好?或许重试下就好了;主要我也不是特别了解阿[捂脸],要不你发个帖子详细问问
 ;然后跟着后边的从0开发教程走一边应该就清楚多了
;然后跟着后边的从0开发教程走一边应该就清楚多了