求助FishBot二驱雷达驱动及建图测试中雷达坐标飘移
-
标题:9.0.6. 雷达驱动及建图测试中雷达坐标飘移
背景:
双系统ubuntu22.04humble,学校没有网线连接,使用了中兴的zte ax3000路由器(192.168.5.1)直接使用(没有网络接入),局域网下有雷达(192.168.5.16)和底盘(192.168.5.17)两个设备无线连接2.4G,有线连接了电脑设备(192.168.5.15),可以从电脑ping通各个设备,延迟在3ms左右。调试一下午无果求助。
问题描述:
启动后选择1,2都没有任何问题,启动2可以使用rviz2查看/scan有显示
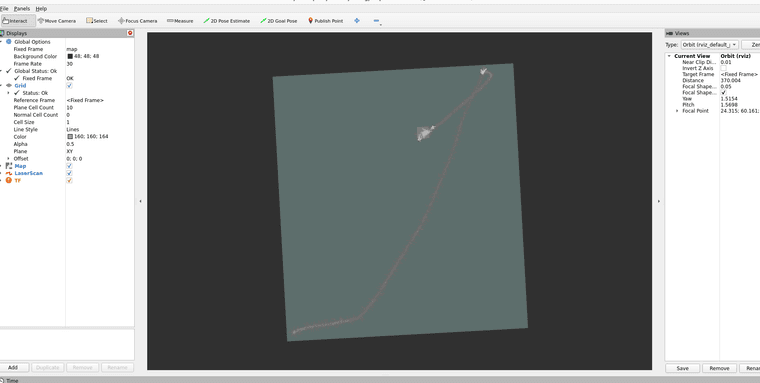
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser启动3后大概10秒左右,坐标laser_frame一直摆动,有时候启动会较大的移动。是无规律移动偏移。
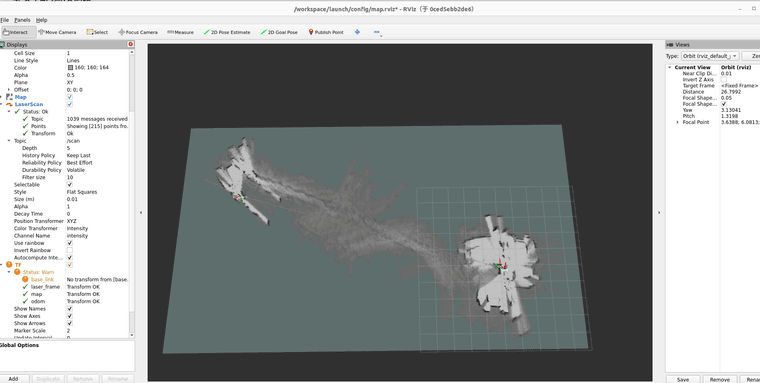
相关的报错[rviz2-5] [ERROR] [1743936304.165026789] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936304.170122 but the latest data is at time 1743936304.170122, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936304.292711213] [cartographer logger]: W0406 10:45:04.000000 1193 range_data_collator.cc:82] Dropped 58 earlier points. [rviz2-5] [ERROR] [1743936304.420242841] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936304.428886 but the latest data is at time 1743936304.428886, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936304.492232970] [cartographer logger]: W0406 10:45:04.000000 1193 range_data_collator.cc:82] Dropped 122 earlier points. [rviz2-5] [ERROR] [1743936304.868194892] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936304.867202 but the latest data is at time 1743936304.867202, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936304.971373479] [cartographer logger]: W0406 10:45:04.000000 1193 range_data_collator.cc:82] Dropped 33 earlier points. [cartographer_node-3] [WARN] [1743936305.324056287] [cartographer logger]: W0406 10:45:05.000000 1193 range_data_collator.cc:82] Dropped 61 earlier points. [cartographer_node-3] [WARN] [1743936305.680169519] [cartographer logger]: W0406 10:45:05.000000 1193 range_data_collator.cc:82] Dropped 20 earlier points. [rviz2-5] [ERROR] [1743936305.701237037] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936305.718245 but the latest data is at time 1743936305.718245, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936305.801039702] [cartographer logger]: W0406 10:45:05.000000 1193 range_data_collator.cc:82] Dropped 128 earlier points. [rviz2-5] [ERROR] [1743936305.924088589] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936305.915421 but the latest data is at time 1743936305.914595, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936306.156616341] [cartographer logger]: W0406 10:45:06.000000 1193 range_data_collator.cc:82] Dropped 1 earlier points. [cartographer_node-3] [WARN] [1743936306.275210361] [cartographer logger]: W0406 10:45:06.000000 1193 range_data_collator.cc:82] Dropped 1 earlier points. [cartographer_node-3] [WARN] [1743936306.392834396] [cartographer logger]: W0406 10:45:06.000000 1193 range_data_collator.cc:82] Dropped 2 earlier points. [rviz2-5] [ERROR] [1743936306.756869305] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936306.750092 but the latest data is at time 1743936306.744621, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [WARN] [1743936306.867860838] [cartographer logger]: W0406 10:45:06.000000 1193 range_data_collator.cc:82] Dropped 4 earlier points. [rviz2-5] [INFO] [1743936306.883874273] [rviz2]: Trying to create a map of size 281 x 239 using 1 swatches [cartographer_node-3] [WARN] [1743936307.342311675] [cartographer logger]: W0406 10:45:07.000000 1193 range_data_collator.cc:82] Dropped 2 earlier points. [cartographer_node-3] [WARN] [1743936307.462635721] [cartographer logger]: W0406 10:45:07.000000 1193 range_data_collator.cc:82] Dropped 1 earlier points. [rviz2-5] [ERROR] [1743936307.587843617] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936307.581517 but the latest data is at time 1743936307.579507, when looking up transform from frame [laser_frame] to frame [map] [cartographer_node-3] [INFO] [1743936307.589459883] [cartographer logger]: I0406 10:45:07.000000 1245 pose_graph_2d.cc:538] Remaining work items in queue: 0 [cartographer_node-3] [INFO] [1743936307.589515821] [cartographer logger]: I0406 10:45:07.000000 1245 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints. [cartographer_node-3] [INFO] [1743936307.589533909] [cartographer logger]: I0406 10:45:07.000000 1245 constraint_builder_2d.cc:292] Score histogram: [cartographer_node-3] Count: 0 [cartographer_node-3] [WARN] [1743936307.698499566] [cartographer logger]: W0406 10:45:07.000000 1193 range_data_collator.cc:82] Dropped 3 earlier points. [cartographer_node-3] [INFO] [1743936307.705796381] [cartographer logger]: I0406 10:45:07.000000 1193 pose_graph_2d.cc:148] Inserted submap (0, 2). [cartographer_node-3] [WARN] [1743936307.819832681] [cartographer logger]: W0406 10:45:07.000000 1193 range_data_collator.cc:82] Dropped 3 earlier points. [rviz2-5] [ERROR] [1743936307.939551212] [rviz2]: Lookup would require extrapolation into the future. Requested time 1743936307.940473 but the latest data is at time 1743936307.934516, when looking up transform from frame [laser_frame] to frame [map]然后再次打开一个rviz2,/scan正常,odom和map移动异常(小车静止)怀疑是odom、map的问题。
[ydlidar_node-6] [2025-04-06 10:52:13][error] Timeout count: 1 [ydlidar_node-6] [2025-04-06 10:52:13][error] Timeout count: 2 [ydlidar_node-6] [2025-04-06 10:52:13][error] Timeout count: 3 [cartographer_node-3] [INFO] [1743936733.740978075] [cartographer logger]: I0406 10:52:13.000000 1193 node.cpp:569] Shutdown the subscriber of [scan] [cartographer_node-3] [INFO] [1743936733.741022840] [cartographer logger]: I0406 10:52:13.000000 1193 map_builder_bridge.cpp:152] Finishing trajectory with ID '0'... [cartographer_node-3] [WARN] [1743936733.741097461] [cartographer logger]: W0406 10:52:13.000000 1193 node.cpp:773] Can't run final optimization if there are one or more active trajectories. Trying to finish trajectory with ID 0 now. [cartographer_node-3] [INFO] [1743936733.741111484] [cartographer logger]: I0406 10:52:13.000000 1193 node.cpp:551] Trajectory 0 already pending to finish. [cartographer_node-3] [INFO] [1743936733.741125170] [cartographer logger]: I0406 10:52:13.000000 1193 map_builder_bridge.cpp:161] Running final trajectory optimization... [cartographer_node-3] [INFO] [1743936733.741155903] [cartographer logger]: I0406 10:52:13.000000 1245 pose_graph_2d.cc:538] Remaining work items in queue: 0 [cartographer_node-3] [INFO] [1743936733.741208203] [cartographer logger]: I0406 10:52:13.000000 1245 constraint_builder_2d.cc:290] 25 computations resulted in 3 additional constraints. [cartographer_node-3] [INFO] [1743936733.741281094] [cartographer logger]: I0406 10:52:13.000000 1245 constraint_builder_2d.cc:292] Score histogram: [cartographer_node-3] Count: 131 Min: 0.650471 Max: 0.898431 Mean: 0.752449 [cartographer_node-3] [0.650471, 0.675267) ## Count: 15 (11.4504%) Total: 15 (11.4504%) [cartographer_node-3] [0.675267, 0.700063) ## Count: 11 (8.39695%) Total: 26 (19.8473%) [cartographer_node-3] [0.700063, 0.724859) ## Count: 11 (8.39695%) Total: 37 (28.2443%) [cartographer_node-3] [0.724859, 0.749655) #### Count: 24 (18.3206%) Total: 61 (46.5649%) [cartographer_node-3] [0.749655, 0.774451) #### Count: 29 (22.1374%) Total: 90 (68.7023%) [cartographer_node-3] [0.774451, 0.799247) ### Count: 22 (16.7939%) Total: 112 (85.4962%) [cartographer_node-3] [0.799247, 0.824043) # Count: 8 (6.10687%) Total: 120 (91.6031%) [cartographer_node-3] [0.824043, 0.848839) Count: 2 (1.52672%) Total: 122 (93.1298%) [cartographer_node-3] [0.848839, 0.873635) # Count: 4 (3.05344%) Total: 126 (96.1832%) [cartographer_node-3] [0.873635, 0.898431] # Count: 5 (3.81679%) Total: 131 (100%) [cartographer_node-3] [INFO] [1743936733.797947533] [cartographer logger]: I0406 10:52:13.000000 1245 pose_graph_2d.cc:538] Remaining work items in queue: 1 [cartographer_node-3] [INFO] [1743936733.797970028] [cartographer logger]: I0406 10:52:13.000000 1245 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints. [cartographer_node-3] [INFO] [1743936733.798014465] [cartographer logger]: I0406 10:52:13.000000 1245 constraint_builder_2d.cc:292] Score histogram: [cartographer_node-3] Count: 131 Min: 0.650471 Max: 0.898431 Mean: 0.752449 [cartographer_node-3] [0.650471, 0.675267) ## Count: 15 (11.4504%) Total: 15 (11.4504%) [cartographer_node-3] [0.675267, 0.700063) ## Count: 11 (8.39695%) Total: 26 (19.8473%) [cartographer_node-3] [0.700063, 0.724859) ## Count: 11 (8.39695%) Total: 37 (28.2443%) [cartographer_node-3] [0.724859, 0.749655) #### Count: 24 (18.3206%) Total: 61 (46.5649%) [cartographer_node-3] [0.749655, 0.774451) #### Count: 29 (22.1374%) Total: 90 (68.7023%) [cartographer_node-3] [0.774451, 0.799247) ### Count: 22 (16.7939%) Total: 112 (85.4962%) [cartographer_node-3] [0.799247, 0.824043) # Count: 8 (6.10687%) Total: 120 (91.6031%) [cartographer_node-3] [0.824043, 0.848839) Count: 2 (1.52672%) Total: 122 (93.1298%) [cartographer_node-3] [0.848839, 0.873635) # Count: 4 (3.05344%) Total: 126 (96.1832%) [cartographer_node-3] [0.873635, 0.898431] # Count: 5 (3.81679%) Total: 131 (100%) [cartographer_node-3] [INFO] [1743936733.813257007] [cartographer logger]: I0406 10:52:13.000000 1244 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints. [cartographer_node-3] [INFO] [1743936733.813303709] [cartographer logger]: I0406 10:52:13.000000 1244 constraint_builder_2d.cc:292] Score histogram: [cartographer_node-3] Count: 131 Min: 0.650471 Max: 0.898431 Mean: 0.752449 [cartographer_node-3] [0.650471, 0.675267) ## Count: 15 (11.4504%) Total: 15 (11.4504%) [cartographer_node-3] [0.675267, 0.700063) ## Count: 11 (8.39695%) Total: 26 (19.8473%) [cartographer_node-3] [0.700063, 0.724859) ## Count: 11 (8.39695%) Total: 37 (28.2443%) [cartographer_node-3] [0.724859, 0.749655) #### Count: 24 (18.3206%) Total: 61 (46.5649%) [cartographer_node-3] [0.749655, 0.774451) #### Count: 29 (22.1374%) Total: 90 (68.7023%) [cartographer_node-3] [0.774451, 0.799247) ### Count: 22 (16.7939%) Total: 112 (85.4962%) [cartographer_node-3] [0.799247, 0.824043) # Count: 8 (6.10687%) Total: 120 (91.6031%) [cartographer_node-3] [0.824043, 0.848839) Count: 2 (1.52672%) Total: 122 (93.1298%) [cartographer_node-3] [0.848839, 0.873635) # Count: 4 (3.05344%) Total: 126 (96.1832%) [cartographer_node-3] [0.873635, 0.898431] # Count: 5 (3.81679%) Total: 131 (100%) [cartographer_node-3] [INFO] [1743936733.815327771] [cartographer logger]: I0406 10:52:13.000000 1246 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints. [cartographer_node-3] [INFO] [1743936733.815367107] [cartographer logger]: I0406 10:52:13.000000 1246 constraint_builder_2d.cc:292] Score histogram: [cartographer_node-3] Count: 131 Min: 0.650471 Max: 0.898431 Mean: 0.752449 [cartographer_node-3] [0.650471, 0.675267) ## Count: 15 (11.4504%) Total: 15 (11.4504%) [cartographer_node-3] [0.675267, 0.700063) ## Count: 11 (8.39695%) Total: 26 (19.8473%) [cartographer_node-3] [0.700063, 0.724859) ## Count: 11 (8.39695%) Total: 37 (28.2443%) [cartographer_node-3] [0.724859, 0.749655) #### Count: 24 (18.3206%) Total: 61 (46.5649%) [cartographer_node-3] [0.749655, 0.774451) #### Count: 29 (22.1374%) Total: 90 (68.7023%) [cartographer_node-3] [0.774451, 0.799247) ### Count: 22 (16.7939%) Total: 112 (85.4962%) [cartographer_node-3] [0.799247, 0.824043) # Count: 8 (6.10687%) Total: 120 (91.6031%) [cartographer_node-3] [0.824043, 0.848839) Count: 2 (1.52672%) Total: 122 (93.1298%) [cartographer_node-3] [0.848839, 0.873635) # Count: 4 (3.05344%) Total: 126 (96.1832%) [cartographer_node-3] [0.873635, 0.898431] # Count: 5 (3.81679%) Total: 131 (100%) Optimizing: Done. Optimizing: Done. [ydlidar_node-6] [YDLIDAR ERROR]: -1 Device is not open [ydlidar_node-6] [ERROR] [1743936734.545499440] [ydlidar_node]: Failed to get scan [ydlidar_node-6] [INFO] [1743936734.545534686] [ydlidar_node]: [YDLIDAR INFO] Now YDLIDAR is stopping ....... [ydlidar_node-6] [2025-04-06 10:52:14][info] Now lidar scanning has stopped! [INFO] [ydlidar_node-6]: process has finished cleanly [pid 1306]补充的红色报错。
具体细节和上下文:
更加离谱了,所有过程都是按照教程进行。尝试过的解决方法:
重新烧录,重新配置都已经用过,问了ai怀疑是时间未同步的导致数据丢失,还配置了chrony同步时间问题。网络配置尝试过两三次。
-
-
@2177527864 直接驱动雷达看看那,电脑这边有线连接试一试
-
@2177527864 老哥搞好了没有,我也是卡在这里
-
@小鱼小鱼老师, 我的问题和他一样,
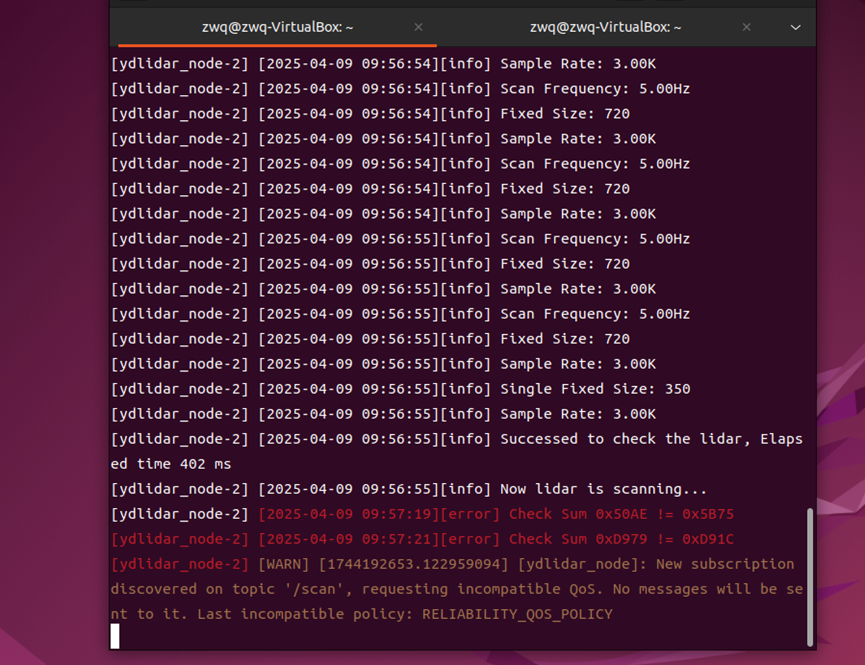 我的雷达驱动是这样的,过了一会会有报错,用的是有线连接。还换过路由器
我的雷达驱动是这样的,过了一会会有报错,用的是有线连接。还换过路由器 -
@196122006 这个看起来很正常,一点问题都没有
-
@小鱼 Ctrl c之后输入3,建图运气好点半分钟,他不会漂移,然后大部分房间都可以明显建图出来,然后就直接开始漂移。我用的也是有线连接路由器,路由器就充个电和连接电脑,是不是通信一会儿之后会出现错误?这里是不是可以察觉哪里有问题?
-
@196122006 路由器只有小车一个设备在用是吗
-
@196122006 拍个建图视频发我微信
-
@小鱼 电脑也连接了,没网我也连接了,好的小鱼老师等一会我拍个视频晚点去公众号那里加你微信
-
@196122006 老哥昨样了,上次没搞好搞别的事情去了
-
同样的问题,小车坐标轴旋转着飞了
-
@2971106661 雷达数据稳定否