局部规划路线没有正常显示
-
各位大佬大家好,我是利用传感器融合得出小车的定位,然后没有启用amcl定位,但是在rviz里面进行单点导航的时候,只有全局规划路径,没有局部规划路径,求赐教,我不是很懂
yu@yu-VMware-Virtual-Platform:~$ ros2 launch navigation_control_pkg nav_launch.py
[INFO] [launch]: All log files can be found below /home/yu/.ros/log/2025-05-13-09-48-33-953275-yu-VMware-Virtual-Platform-15914
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [15917]
[INFO] [rviz2-2]: process started with pid [15918]
[INFO] [map_server-3]: process started with pid [15919]
[INFO] [planner_server-4]: process started with pid [15920]
[INFO] [controller_server-5]: process started with pid [15921]
[INFO] [smoother_server-6]: process started with pid [15922]
[INFO] [bt_navigator-7]: process started with pid [15923]
[INFO] [static_odom_publisher-8]: process started with pid [15924]
[INFO] [behavior_server-9]: process started with pid [15925]
[INFO] [lifecycle_manager-10]: process started with pid [15926]
[robot_state_publisher-1] [WARN] [1747100914.324080285] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[robot_state_publisher-1] [INFO] [1747100914.324150889] [robot_state_publisher]: Robot initialized
[lifecycle_manager-10] [INFO] [1747100914.329658698] [lifecycle_manager_navigation]: Creating
[smoother_server-6] [INFO] [1747100914.375066483] [smoother_server]:
[smoother_server-6] smoother_server lifecycle node launched.
[smoother_server-6] Waiting on external lifecycle transitions to activate
[smoother_server-6] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-4] [INFO] [1747100914.390594806] [planner_server]:
[planner_server-4] planner_server lifecycle node launched.
[planner_server-4] Waiting on external lifecycle transitions to activate
[planner_server-4] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-7] [INFO] [1747100914.394227232] [bt_navigator]:
[bt_navigator-7] bt_navigator lifecycle node launched.
[bt_navigator-7] Waiting on external lifecycle transitions to activate
[bt_navigator-7] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[lifecycle_manager-10] [INFO] [1747100914.398661698] [lifecycle_manager_navigation]: Creating and initializing lifecycle service clients
[planner_server-4] [INFO] [1747100914.412073873] [planner_server]: Creating
[smoother_server-6] [INFO] [1747100914.412327716] [smoother_server]: Creating smoother server
[bt_navigator-7] [INFO] [1747100914.414433545] [bt_navigator]: Creating
[planner_server-4] [INFO] [1747100914.507837234] [global_costmap.global_costmap]:
[planner_server-4] global_costmap lifecycle node launched.
[planner_server-4] Waiting on external lifecycle transitions to activate
[planner_server-4] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-4] [INFO] [1747100914.522232758] [global_costmap.global_costmap]: Creating Costmap
[behavior_server-9] [INFO] [1747100914.560246631] [behavior_server]:
[behavior_server-9] behavior_server lifecycle node launched.
[behavior_server-9] Waiting on external lifecycle transitions to activate
[behavior_server-9] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[controller_server-5] [INFO] [1747100914.605466176] [controller_server]:
[controller_server-5] controller_server lifecycle node launched.
[controller_server-5] Waiting on external lifecycle transitions to activate
[controller_server-5] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[map_server-3] [INFO] [1747100914.624003150] [map_server]:
[map_server-3] map_server lifecycle node launched.
[map_server-3] Waiting on external lifecycle transitions to activate
[map_server-3] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[controller_server-5] [INFO] [1747100914.629008846] [controller_server]: Creating controller server
[map_server-3] [INFO] [1747100914.631626954] [map_server]: Creating
[lifecycle_manager-10] [INFO] [1747100914.676654833] [lifecycle_manager_navigation]: Starting managed nodes bringup...
[lifecycle_manager-10] [INFO] [1747100914.677305658] [lifecycle_manager_navigation]: Configuring map_server
[map_server-3] [INFO] [1747100914.679942003] [map_server]: Configuring
[map_server-3] [INFO] [1747100914.680570645] [map_io]: Loading yaml file: /home/yu/bvad_sys/install/navigation_control_pkg/share/navigation_control_pkg/map_demo/map2.yaml
[map_server-3] [INFO] [1747100914.685466151] [map_io]: resolution: 0.05
[map_server-3] [INFO] [1747100914.685496588] [map_io]: origin[0]: 0
[map_server-3] [INFO] [1747100914.685502973] [map_io]: origin[1]: 0
[map_server-3] [INFO] [1747100914.685524186] [map_io]: origin[2]: 0
[map_server-3] [INFO] [1747100914.685530897] [map_io]: free_thresh: 0.25
[map_server-3] [INFO] [1747100914.685537137] [map_io]: occupied_thresh: 0.65
[map_server-3] [INFO] [1747100914.685547493] [map_io]: mode: trinary
[map_server-3] [INFO] [1747100914.685554290] [map_io]: negate: 0
[map_server-3] [INFO] [1747100914.687340625] [map_io]: Loading image_file: /home/yu/bvad_sys/install/navigation_control_pkg/share/navigation_control_pkg/map_demo/map2.pgm
[controller_server-5] [INFO] [1747100914.689724656] [local_costmap.local_costmap]:
[controller_server-5] local_costmap lifecycle node launched.
[controller_server-5] Waiting on external lifecycle transitions to activate
[controller_server-5] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[controller_server-5] [INFO] [1747100914.692032104] [local_costmap.local_costmap]: Creating Costmap
[map_server-3] [INFO] [1747100914.968284565] [map_io]: Read map /home/yu/bvad_sys/install/navigation_control_pkg/share/navigation_control_pkg/map_demo/map2.pgm: 2670 X 1132 map @ 0.05 m/cell
[lifecycle_manager-10] [INFO] [1747100914.989223846] [lifecycle_manager_navigation]: Configuring planner_server
[planner_server-4] [INFO] [1747100914.989668760] [planner_server]: Configuring
[planner_server-4] [INFO] [1747100914.989698284] [global_costmap.global_costmap]: Configuring
[planner_server-4] [INFO] [1747100915.001097389] [global_costmap.global_costmap]: Using plugin "static_layer"
[rviz2-2] [INFO] [1747100915.005090150] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-2] [INFO] [1747100915.007370141] [rviz2]: OpenGl version: 4.3 (GLSL 4.3)
[planner_server-4] [INFO] [1747100915.008955159] [global_costmap.global_costmap]: Subscribing to the map topic (/map) with transient local durability
[planner_server-4] [INFO] [1747100915.012457047] [global_costmap.global_costmap]: Initialized plugin "static_layer"
[planner_server-4] [INFO] [1747100915.012504378] [global_costmap.global_costmap]: Using plugin "obstacle_layer"
[planner_server-4] [INFO] [1747100915.012833094] [global_costmap.global_costmap]: Subscribed to Topics:
[planner_server-4] [INFO] [1747100915.012885175] [global_costmap.global_costmap]: Initialized plugin "obstacle_layer"
[planner_server-4] [INFO] [1747100915.012894492] [global_costmap.global_costmap]: Using plugin "inflation_layer"
[planner_server-4] [INFO] [1747100915.013110899] [global_costmap.global_costmap]: Initialized plugin "inflation_layer"
[planner_server-4] [INFO] [1747100915.060493575] [planner_server]: Created global planner plugin GridBased of type nav2_navfn_planner::NavfnPlanner
[planner_server-4] [INFO] [1747100915.060545036] [planner_server]: Configuring plugin GridBased of type NavfnPlanner
[planner_server-4] [INFO] [1747100915.061490535] [planner_server]: Planner Server has GridBased planners available.
[lifecycle_manager-10] [INFO] [1747100915.086606540] [lifecycle_manager_navigation]: Configuring controller_server
[controller_server-5] [INFO] [1747100915.086914040] [controller_server]: Configuring controller interface
[controller_server-5] [INFO] [1747100915.086936697] [controller_server]: getting progress checker plugins..
[controller_server-5] [INFO] [1747100915.087893026] [controller_server]: getting goal checker plugins..
[controller_server-5] [INFO] [1747100915.088841874] [controller_server]: Controller frequency set to 20.0000Hz
[controller_server-5] [INFO] [1747100915.088887492] [local_costmap.local_costmap]: Configuring
[rviz2-2] [INFO] [1747100915.100599344] [rviz2]: Stereo is NOT SUPPORTED
[controller_server-5] [INFO] [1747100915.103631812] [local_costmap.local_costmap]: Using plugin "static_layer"
[controller_server-5] [INFO] [1747100915.113471162] [local_costmap.local_costmap]: Subscribing to the map topic (/map) with transient local durability
[controller_server-5] [INFO] [1747100915.120460130] [local_costmap.local_costmap]: Initialized plugin "static_layer"
[controller_server-5] [INFO] [1747100915.120497637] [local_costmap.local_costmap]: Using plugin "obstacle_layer"
[controller_server-5] [INFO] [1747100915.120697903] [local_costmap.local_costmap]: Subscribed to Topics:
[controller_server-5] [INFO] [1747100915.120755539] [local_costmap.local_costmap]: Initialized plugin "obstacle_layer"
[controller_server-5] [INFO] [1747100915.120764605] [local_costmap.local_costmap]: Using plugin "inflation_layer"
[controller_server-5] [INFO] [1747100915.120940097] [local_costmap.local_costmap]: Initialized plugin "inflation_layer"
[controller_server-5] [INFO] [1747100915.152247604] [controller_server]: Created progress_checker : progress_checker of type nav2_controller::SimpleProgressChecker
[controller_server-5] [INFO] [1747100915.152443931] [controller_server]: Controller Server has progress_checker progress checkers available.
[controller_server-5] [INFO] [1747100915.152811694] [controller_server]: Created goal checker : goal_checker of type nav2_controller::SimpleGoalChecker
[controller_server-5] [INFO] [1747100915.155203128] [controller_server]: Controller Server has goal_checker goal checkers available.
[controller_server-5] [INFO] [1747100915.156430196] [controller_server]: Created controller : FollowPath of type nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController
[controller_server-5] [INFO] [1747100915.162167774] [controller_server]: Controller Server has FollowPath controllers available.
[lifecycle_manager-10] [INFO] [1747100915.181558813] [lifecycle_manager_navigation]: Configuring smoother_server
[smoother_server-6] [INFO] [1747100915.181900889] [smoother_server]: Configuring smoother server
[smoother_server-6] [INFO] [1747100915.211209905] [smoother_server]: Created smoother : simple_smoother of type nav2_smoother::SimpleSmoother
[smoother_server-6] [INFO] [1747100915.216868949] [smoother_server]: Smoother Server has simple_smoother smoothers available.
[lifecycle_manager-10] [INFO] [1747100915.230298375] [lifecycle_manager_navigation]: Configuring bt_navigator
[bt_navigator-7] [INFO] [1747100915.230516639] [bt_navigator]: Configuring
[bt_navigator-7] [INFO] [1747100915.246862416] [bt_navigator]: Creating navigator id navigate_to_pose of type nav2_bt_navigator::NavigateToPoseNavigator
[bt_navigator-7] [INFO] [1747100915.346964804] [bt_navigator]: Creating navigator id navigate_through_poses of type nav2_bt_navigator::NavigateThroughPosesNavigator
[rviz2-2] [INFO] [1747100915.360519023] [rviz2_unique]: Subscribing to: /mobile_base/sensors/bumper_pointcloud
[rviz2-2]
[rviz2-2] [INFO] [1747100915.364062100] [rviz2_unique]: Subscribing to: /mobile_base/sensors/bumper_pointcloud
[rviz2-2]
[rviz2-2] [INFO] [1747100915.376528718] [rviz2_unique]: Subscribing to: /local_costmap/voxel_marked_cloud
[rviz2-2]
[lifecycle_manager-10] [INFO] [1747100915.411092678] [lifecycle_manager_navigation]: Configuring behavior_server
[behavior_server-9] [INFO] [1747100915.411396377] [behavior_server]: Configuring
[behavior_server-9] [INFO] [1747100915.429790675] [behavior_server]: Creating behavior plugin spin of type nav2_behaviors::Spin
[behavior_server-9] [INFO] [1747100915.430847719] [behavior_server]: Creating behavior plugin backup of type nav2_behaviors::BackUp
[behavior_server-9] [INFO] [1747100915.433852608] [behavior_server]: Creating behavior plugin drive_on_heading of type nav2_behaviors::DriveOnHeading
[behavior_server-9] [INFO] [1747100915.435181552] [behavior_server]: Creating behavior plugin wait of type nav2_behaviors::Wait
[behavior_server-9] [INFO] [1747100915.451081211] [behavior_server]: Configuring spin
[rviz2-2] [INFO] [1747100915.470103711] [rviz2_unique]: Subscribing to: /global_costmap/voxel_marked_cloud
[rviz2-2]
[behavior_server-9] [INFO] [1747100915.478426684] [behavior_server]: Configuring backup
[behavior_server-9] [INFO] [1747100915.484645655] [behavior_server]: Configuring drive_on_heading
[behavior_server-9] [INFO] [1747100915.490930700] [behavior_server]: Configuring wait
[lifecycle_manager-10] [INFO] [1747100915.499227574] [lifecycle_manager_navigation]: Activating map_server
[map_server-3] [INFO] [1747100915.499437800] [map_server]: Activating
[map_server-3] [INFO] [1747100915.507832965] [map_server]: Creating bond (map_server) to lifecycle manager.
[rviz2-2] [INFO] [1747100915.555908701] [rviz2_unique]: Subscribing to: /mobile_base/sensors/bumper_pointcloud
[rviz2-2]
[rviz2-2] [INFO] [1747100915.559498498] [rviz2_unique]: Subscribing to: /local_costmap/voxel_marked_cloud
[rviz2-2]
[rviz2-2] [INFO] [1747100915.583296897] [rviz2_unique]: Subscribing to: /global_costmap/voxel_marked_cloud
[rviz2-2]
[controller_server-5] [INFO] [1747100915.591396723] [local_costmap.local_costmap]: StaticLayer: Resizing costmap to 2670 X 1132 at 0.050000 m/pix
[planner_server-4] [INFO] [1747100915.610825872] [global_costmap.global_costmap]: StaticLayer: Resizing costmap to 2670 X 1132 at 0.050000 m/pix
[lifecycle_manager-10] [INFO] [1747100915.632059666] [lifecycle_manager_navigation]: Server map_server connected with bond.
[lifecycle_manager-10] [INFO] [1747100915.632111258] [lifecycle_manager_navigation]: Activating planner_server
[planner_server-4] [INFO] [1747100915.632732619] [planner_server]: Activating
[planner_server-4] [INFO] [1747100915.632772647] [global_costmap.global_costmap]: Activating
[planner_server-4] [INFO] [1747100915.632782393] [global_costmap.global_costmap]: Checking transform
[planner_server-4] [INFO] [1747100915.632889724] [global_costmap.global_costmap]: start
[planner_server-4] [INFO] [1747100915.683179517] [planner_server]: Activating plugin GridBased of type NavfnPlanner
[planner_server-4] [INFO] [1747100915.702894231] [planner_server]: Creating bond (planner_server) to lifecycle manager.
[rviz2-2] [WARN] [1747100915.710031613] [rcl.logging_rosout]: Publisher already registered for node name: 'rviz2_unique'. If this is due to multiple nodes with the same name then all logs for the logger named 'rviz2_unique' will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[rviz2-2] [INFO] [1747100915.750628379] [rviz2_unique]: Trying to load plugins...
[rviz2-2] [WARN] [1747100915.755316149] [rcl.logging_rosout]: Publisher already registered for node name: 'rviz2_unique'. If this is due to multiple nodes with the same name then all logs for the logger named 'rviz2_unique' will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[lifecycle_manager-10] [INFO] [1747100915.821212826] [lifecycle_manager_navigation]: Server planner_server connected with bond.
[lifecycle_manager-10] [INFO] [1747100915.821321759] [lifecycle_manager_navigation]: Activating controller_server
[controller_server-5] [INFO] [1747100915.821849868] [controller_server]: Activating
[controller_server-5] [INFO] [1747100915.821878751] [local_costmap.local_costmap]: Activating
[controller_server-5] [INFO] [1747100915.821887979] [local_costmap.local_costmap]: Checking transform
[controller_server-5] [INFO] [1747100915.822033717] [local_costmap.local_costmap]: start
[controller_server-5] [INFO] [1747100915.922174130] [controller_server]: Activating controller: FollowPath of type regulated_pure_pursuit_controller::RegulatedPurePursuitController
[controller_server-5] [INFO] [1747100915.922220582] [controller_server]: Creating bond (controller_server) to lifecycle manager.
[rviz2-2] [INFO] [1747100916.033091367] [rviz2]: Trying to create a map of size 2670 x 1132 using 1 swatches
[lifecycle_manager-10] [INFO] [1747100916.042536544] [lifecycle_manager_navigation]: Server controller_server connected with bond.
[lifecycle_manager-10] [INFO] [1747100916.042586872] [lifecycle_manager_navigation]: Activating smoother_server
[smoother_server-6] [INFO] [1747100916.044912328] [smoother_server]: Activating
[smoother_server-6] [INFO] [1747100916.044950947] [smoother_server]: Creating bond (smoother_server) to lifecycle manager.
[rviz2-2] [INFO] [1747100916.094060392] [rviz2]: Trying to create a map of size 2670 x 1132 using 1 swatches
[rviz2-2] [ERROR] [1747100916.137903162] [rviz2]: rviz/glsl120/indexed_8bit_image.vert
[rviz2-2] rviz/glsl120/indexed_8bit_image.frag
[rviz2-2] GLSL link result :
[rviz2-2] active samplers with a different type refer to the same texture image unit
[rviz2-2] [INFO] [1747100916.141096146] [rviz2]: Trying to create a map of size 2670 x 1132 using 1 swatches
[lifecycle_manager-10] [INFO] [1747100916.166517431] [lifecycle_manager_navigation]: Server smoother_server connected with bond.
[lifecycle_manager-10] [INFO] [1747100916.166591733] [lifecycle_manager_navigation]: Activating bt_navigator
[bt_navigator-7] [INFO] [1747100916.166933140] [bt_navigator]: Activating
[bt_navigator-7] [INFO] [1747100916.309872959] [bt_navigator]: Creating bond (bt_navigator) to lifecycle manager.
[lifecycle_manager-10] [INFO] [1747100916.424425426] [lifecycle_manager_navigation]: Server bt_navigator connected with bond.
[lifecycle_manager-10] [INFO] [1747100916.424461215] [lifecycle_manager_navigation]: Activating behavior_server
[behavior_server-9] [INFO] [1747100916.427324147] [behavior_server]: Activating
[behavior_server-9] [INFO] [1747100916.427362810] [behavior_server]: Activating spin
[behavior_server-9] [INFO] [1747100916.427377942] [behavior_server]: Activating backup
[behavior_server-9] [INFO] [1747100916.427389451] [behavior_server]: Activating drive_on_heading
[behavior_server-9] [INFO] [1747100916.427442800] [behavior_server]: Activating wait
[behavior_server-9] [INFO] [1747100916.427460360] [behavior_server]: Creating bond (behavior_server) to lifecycle manager.
[lifecycle_manager-10] [INFO] [1747100916.537525356] [lifecycle_manager_navigation]: Server behavior_server connected with bond.
[lifecycle_manager-10] [INFO] [1747100916.537563709] [lifecycle_manager_navigation]: Managed nodes are active
[lifecycle_manager-10] [INFO] [1747100916.537587494] [lifecycle_manager_navigation]: Creating bond timer...
[rviz2-2] Start navigation
[rviz2-2] [INFO] [1747100938.437666145] [rviz_navigation_dialog_action_client]: NavigateToPose will be called using the BT Navigator's default behavior tree.
[bt_navigator-7] [INFO] [1747100938.439450583] [bt_navigator]: Begin navigating from current location (10.00, 4.00) to (4.51, 7.93)
[controller_server-5] [INFO] [1747100938.552162495] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [WARN] [1747100938.552307376] [controller_server]: No goal checker was specified in parameter 'current_goal_checker'. Server will use only plugin loaded goal_checker . This warning will appear once.
[controller_server-5] [WARN] [1747100938.552332650] [controller_server]: No progress checker was specified in parameter 'current_progress_checker'. Server will use only plugin loaded progress_checker . This warning will appear once.
[controller_server-5] [INFO] [1747100939.702587032] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100940.752561406] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100941.803278556] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100947.202570958] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100948.252556747] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747100948.552809409] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747100948.552971603] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747100948.570876810] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[controller_server-5] [INFO] [1747100948.573142219] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [WARN] [1747100948.654333109] [controller_server]: Control loop missed its desired rate of 20.0000 Hz. Current loop rate is 12.3275 Hz.
[controller_server-5] [INFO] [1747100949.273638559] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100950.323316794] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100951.423340753] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100952.473318006] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747100958.673391416] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747100958.673562147] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747100958.691254258] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[planner_server-4] [INFO] [1747100958.695229421] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap
[controller_server-5] [INFO] [1747100958.880952627] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [INFO] [1747100959.931170220] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100960.981138380] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100962.031349983] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100968.281190344] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747100968.881332906] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747100968.882182239] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747100968.902825382] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[controller_server-5] [INFO] [1747100968.905313404] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [WARN] [1747100969.046377836] [controller_server]: Control loop missed its desired rate of 20.0000 Hz. Current loop rate is 7.0932 Hz.
[controller_server-5] [INFO] [1747100969.354686819] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100970.386770841] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100971.446472436] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100977.596611523] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100978.646474395] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747100979.046544245] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747100979.046677583] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[behavior_server-9] [INFO] [1747100979.061236331] [behavior_server]: Running spin
[behavior_server-9] [INFO] [1747100979.061428032] [behavior_server]: Turning 1.57 for spin behavior.
[behavior_server-9] [WARN] [1747100989.061669830] [behavior_server]: Exceeded time allowance before reaching the Spin goal - Exiting Spin
[behavior_server-9] [WARN] [1747100989.061726559] [behavior_server]: spin failed
[behavior_server-9] [WARN] [1747100989.061751663] [behavior_server]: [spin] [ActionServer] Aborting handle.
[behavior_server-9] [INFO] [1747100989.081636341] [behavior_server]: Running wait
[behavior_server-9] [INFO] [1747100994.082094697] [behavior_server]: wait completed successfully
[controller_server-5] [INFO] [1747100994.150561701] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [INFO] [1747100995.200901794] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100996.300720140] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100997.300758919] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747100998.400733016] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747101004.150825352] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747101004.151057072] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747101004.172793384] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[controller_server-5] [INFO] [1747101004.174961164] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [WARN] [1747101004.245963916] [controller_server]: Control loop missed its desired rate of 20.0000 Hz. Current loop rate is 14.0990 Hz.
[controller_server-5] [INFO] [1747101004.625179592] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747101005.676344516] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747101011.925155244] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747101014.275241507] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747101014.275501302] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[behavior_server-9] [INFO] [1747101014.290824687] [behavior_server]: Running backup
[behavior_server-9] [WARN] [1747101014.291918011] [behavior_server]: Collision Ahead - Exiting DriveOnHeading
[behavior_server-9] [WARN] [1747101014.291946508] [behavior_server]: backup failed
[behavior_server-9] [WARN] [1747101014.291960385] [behavior_server]: [backup] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747101014.310170833] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[planner_server-4] [INFO] [1747101014.311742946] [global_costmap.global_costmap]: Received request to clear entirely the global_costmap
[controller_server-5] [INFO] [1747101014.500529120] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [INFO] [1747101015.550692924] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747101016.600716028] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747101017.701023222] [controller_server]: Passing new path to controller.
[controller_server-5] [INFO] [1747101018.750732518] [controller_server]: Passing new path to controller.
[controller_server-5] [ERROR] [1747101024.500767787] [controller_server]: Failed to make progress
[controller_server-5] [WARN] [1747101024.500844816] [controller_server]: [follow_path] [ActionServer] Aborting handle.
[controller_server-5] [INFO] [1747101024.520278303] [local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[controller_server-5] [INFO] [1747101024.522308097] [controller_server]: Received a goal, begin computing control effort.
[controller_server-5] [WARN] [1747101024.653490396] [controller_server]: Control loop missed its desired rate of 20.0000 Hz. Current loop rate is 7.6269 Hz.
[controller_server-5] [INFO] [1747101024.960873299] [controller_server]: Passing new path to controller.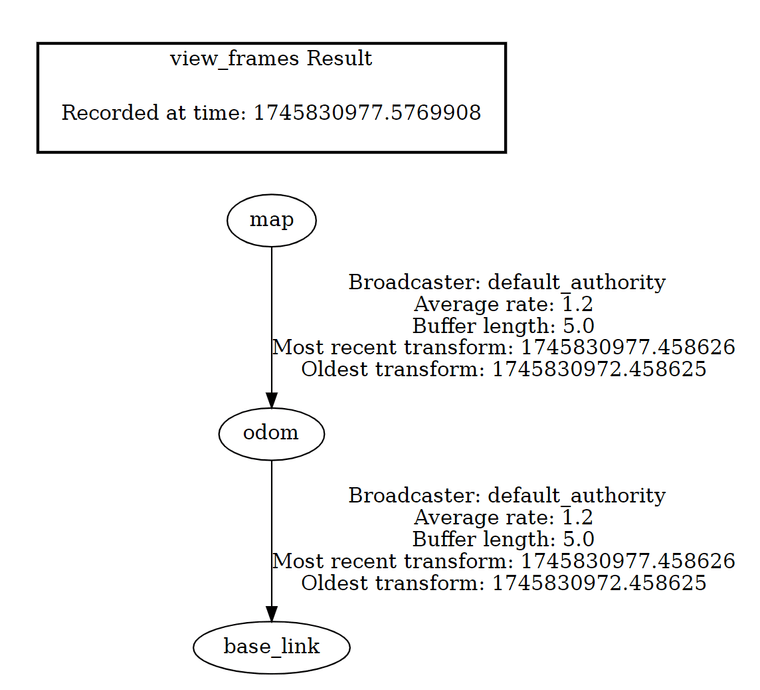
-
我没有启动仿真,也没有连接小车,但是正常是不是刚开始的时候,应该是会有局部规划路径显示,然后一段时间之后局部规划路线再消失,但是局部规划路线一直都没有显示,感觉不太正常

