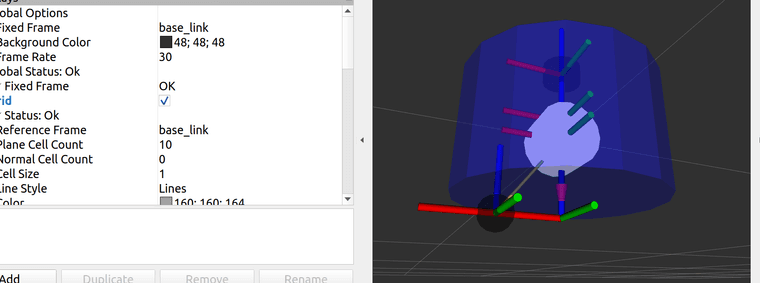
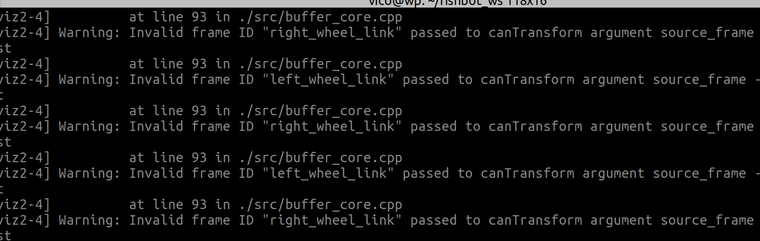
在例程中载入fishbot_gazebo.urdf文件后,gazebo里面没有显示,rviz里面显示的模型不正确。在terminal 启动栏一直launch后提示 Invalid frame ID passed to Cantransform
-
 按例程的urdf文件载入launch py后,
按例程的urdf文件载入launch py后,
显示不正常。 -
@vico1999 问题应该还在gazebo这边,贴一下终端日志
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小伊 在例程中载入fishbot_gazebo.urdf文件后,gazebo里面没有显示,rviz里面显示的模型不正确。在terminal 启动栏一直launch后提示 Invalid frame ID passed to Cantransform
-
这个错误的原因可能是你的URDF文件中的frame_id没有正确设置。可以检查你的URDF文件中的frame_id是否正确设置,如果不正确,可以尝试更改frame_id的值,以便正确的显示模型。