ROS2入门篇第3章-自定义接口RCLCPP实战colcon build失败
-
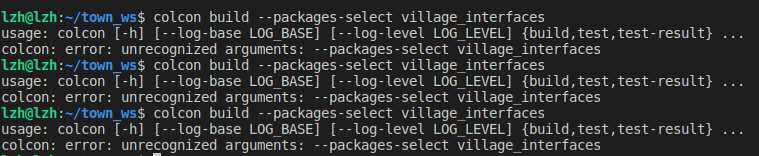
ROS2入门篇第3章-自定义接口RCLCPP实战colcon build失败代码也没问题啊,
-
# 直接使用ROS2原始的数据类型 string content # 图像消息,调用sensor_msgs下的Image类型 sensor_msgs/Image image -
cmake_minimum_required(VERSION 3.8) project(village_interfaces) if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() # find dependencies find_package(ament_cmake REQUIRED) #添加对sensor_msgs的 find_package(sensor_msgs REQUIRED) find_package(rosidl_default_generators REQUIRED) #添加消息文件和依赖 rosidl_generate_interfaces(${PROJECT_NAME} "msg/Novel.msg" DEPENDENCIES sensor_msgs ) # uncomment the following section in order to fill in # further dependencies manually. # find_package(<dependency> REQUIRED) if(BUILD_TESTING) find_package(ament_lint_auto REQUIRED) # the following line skips the linter which checks for copyrights # comment the line when a copyright and license is added to all source files set(ament_cmake_copyright_FOUND TRUE) # the following line skips cpplint (only works in a git repo) # comment the line when this package is in a git repo and when # a copyright and license is added to all source files set(ament_cmake_cpplint_FOUND TRUE) ament_lint_auto_find_test_dependencies() endif() ament_package() -
<?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <package format="3"> <name>village_interfaces</name> <version>0.0.0</version> <description>TODO: Package description</description> <maintainer email="lzh@todo.todo">lzh</maintainer> <license>TODO: License declaration</license> <buildtool_depend>ament_cmake</buildtool_depend> <test_depend>ament_lint_auto</test_depend> <test_depend>ament_lint_common</test_depend> <depend>sensor_msgs</depend> <build_depend>rosidl_default_generators</build_depend> <exec_depend>rosidl_default_runtime</exec_depend> <member_of_group>rosidl_interface_packages</member_of_group> <export> <build_type>ament_cmake</build_type> </export> </package>