3.电机控制之正反转实验
-
我看到电路图上,AIN1和AIN2是对应22,23口,BIN1和BIN2对应的事12,13口。
在测试了AIN1和AIN2的代码(也就是demo的代码)没有问题以后,我对代码进行了如下修改:增加
#define BIN1 12 // 电机驱动模块BIN1引脚
#define BIN2 13 // 电机驱动模块BIN2引脚增加下面相应的switch代码:
在有AIN1和AIN2下面增加
digitalWrite(BIN1, HIGH);
digitalWrite(BIN2, LOW);
……………………………………但是发现,仍然只有第一个轮子转动
我再次将所有AIN1和AIN2相关代码删除,只保留BIN1和BIN2的代码
仍然还是这个轮子转动。请问是为什么呢?
-
@harebert 提问尽量在FishBot专栏下,还有pinmode呢,尽量贴出完整代码和上下文,以及四驱还是二驱,参考的原理图部分截图等等。
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼
我是四驅車
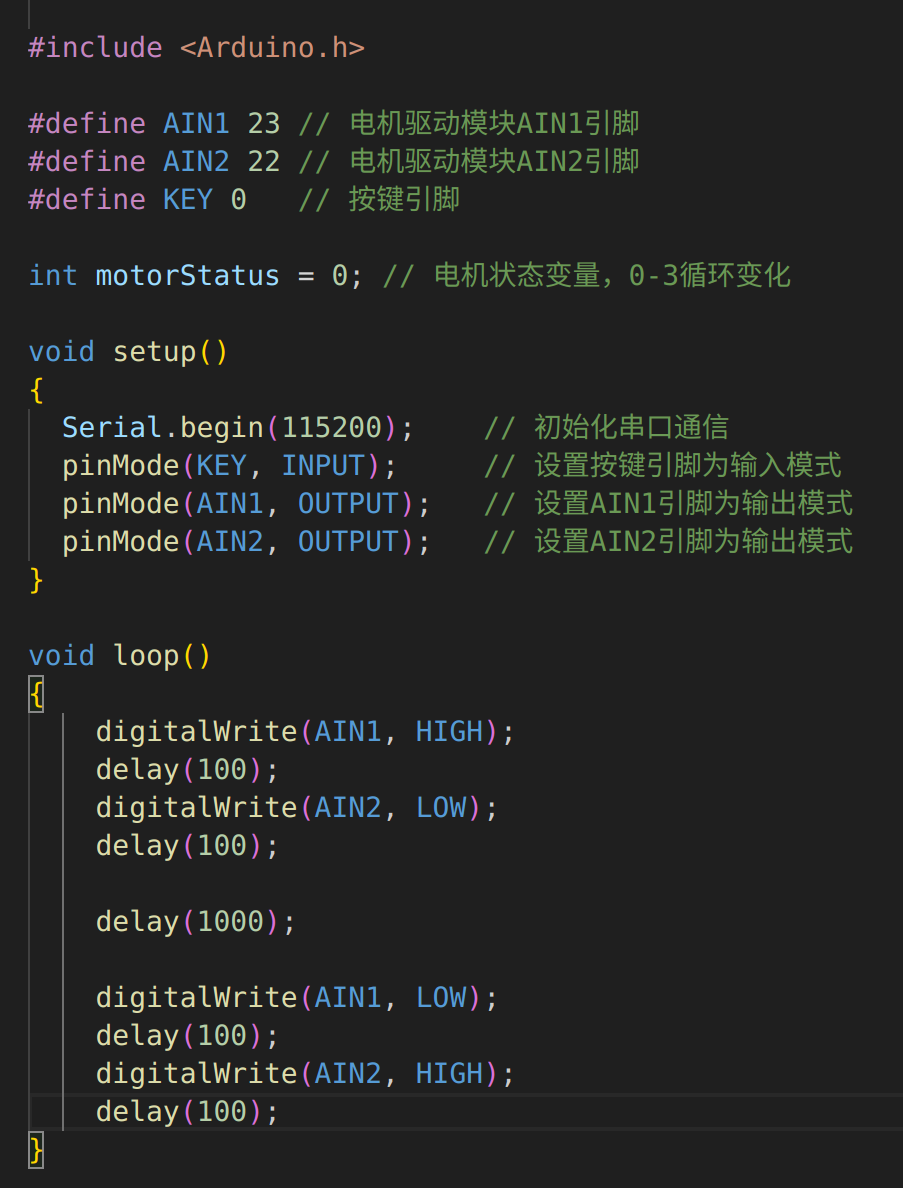
程序代碼如上,
現在是一個輪子,只網一個方向轉動。沒有反轉。 -
@harebert 代码最好复制粘贴,你参考的原理图引脚贴一下
-
 小 小伊 从 中的 FishROS2GO 移动了该主题
小 小伊 从 中的 FishROS2GO 移动了该主题