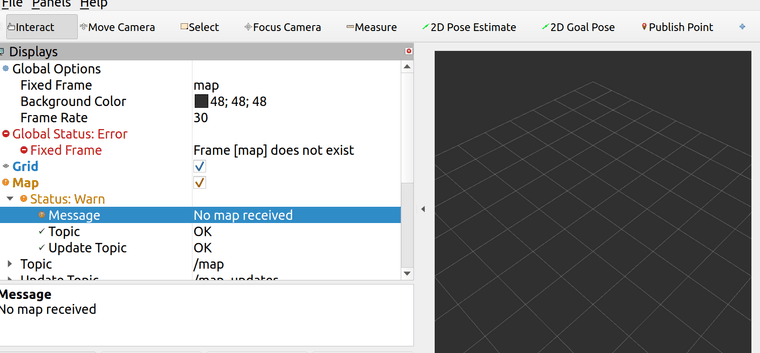
10.5章节执行ros2 launch fishbot_cartographer cartographer.launch.py 后,rviz不能显示点云map
-
[cartographer_node-1] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist
[cartographer_node-1] 。按章节的内容启动rviz后,
-
@vico1999 我也是,解决了吗

-
@735113351 大佬有解决吗,遇到了同样的问题
-
有大佬解决了吗?
-
- 解決了,gazebo launch.py 那个文件没有robot_state_publisher,添加之后urdf能加载进去就可以了