cartographer保存图与rviz显示不一致,且在nav2中加载保存的图是一片白
-
标题:cartographer保存图与rviz显示不一致,且在nav2中加载保存的图是一片白
问题描述:
硬件 nuc x86平台
系统版本 ubuntu20.04
ros版本 foxy
cartographer建图后使用下面命令后保存的图保存图与rviz显示不一致,且在nav2中加载保存的图是一片白ros2 run nav2_map_server map_saver_cli -t map -f fishbot_map如下图所示
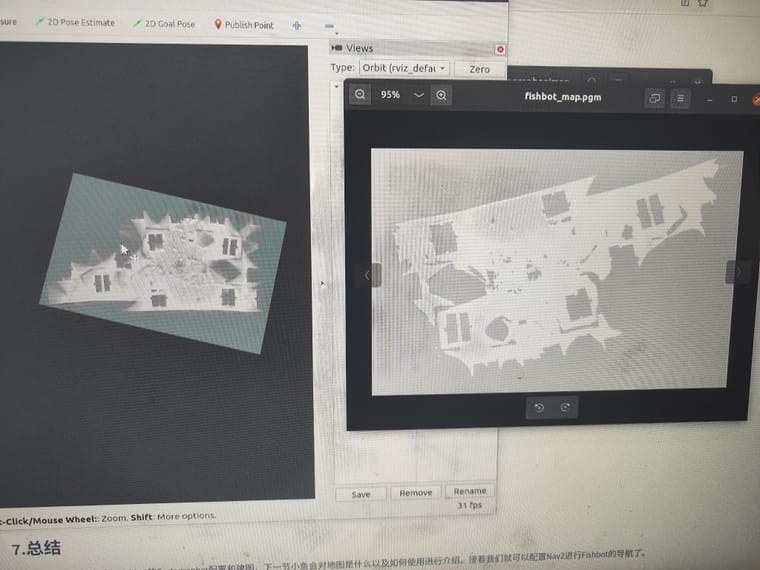
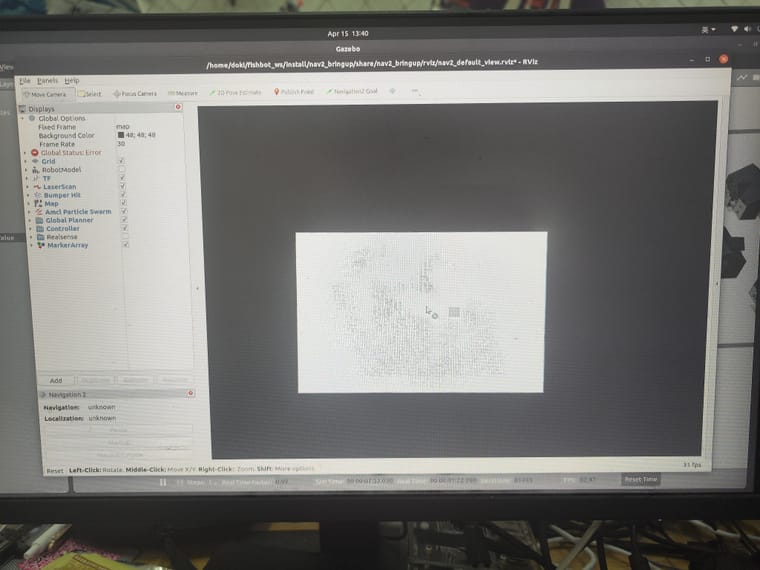
nav2导入的图是空白的(确定map文件夹下的图已经替换为最新的,编译后share目录下也有对应的图)
nav2 parmar 配置如下amcl: ros__parameters: use_sim_time: True alpha1: 0.2 alpha2: 0.2 alpha3: 0.2 alpha4: 0.2 alpha5: 0.2 base_frame_id: "base_footprint" beam_skip_distance: 0.5 beam_skip_error_threshold: 0.9 beam_skip_threshold: 0.3 do_beamskip: false global_frame_id: "map" lambda_short: 0.1 laser_likelihood_max_dist: 2.0 laser_max_range: 100.0 laser_min_range: -1.0 laser_model_type: "likelihood_field" max_beams: 60 max_particles: 2000 min_particles: 500 odom_frame_id: "odom" pf_err: 0.05 pf_z: 0.99 recovery_alpha_fast: 0.0 recovery_alpha_slow: 0.0 resample_interval: 1 robot_model_type: "differential" save_pose_rate: 0.5 sigma_hit: 0.2 tf_broadcast: true transform_tolerance: 1.0 update_min_a: 0.2 update_min_d: 0.25 z_hit: 0.5 z_max: 0.05 z_rand: 0.5 z_short: 0.05 scan_topic: scan amcl_map_client: ros__parameters: use_sim_time: True amcl_rclcpp_node: ros__parameters: use_sim_time: True bt_navigator: ros__parameters: use_sim_time: True global_frame: map robot_base_frame: base_link odom_topic: /odom enable_groot_monitoring: True groot_zmq_publisher_port: 1666 groot_zmq_server_port: 1667 default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml" plugin_lib_names: - nav2_compute_path_to_pose_action_bt_node - nav2_follow_path_action_bt_node - nav2_back_up_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_truncate_path_action_bt_node - nav2_goal_updater_node_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_distance_traveled_condition_bt_node bt_navigator_rclcpp_node: ros__parameters: use_sim_time: True controller_server: ros__parameters: use_sim_time: True controller_frequency: 20.0 min_x_velocity_threshold: 0.001 min_y_velocity_threshold: 0.5 min_theta_velocity_threshold: 0.001 progress_checker_plugin: "progress_checker" goal_checker_plugin: "goal_checker" controller_plugins: ["FollowPath"] # Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters goal_checker: plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 stateful: True # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0 controller_server_rclcpp_node: ros__parameters: use_sim_time: True local_costmap: local_costmap: ros__parameters: update_frequency: 5.0 publish_frequency: 2.0 global_frame: odom robot_base_frame: base_link use_sim_time: True rolling_window: true width: 3 height: 3 resolution: 0.05 robot_radius: 0.12 plugins: ["voxel_layer", "inflation_layer"] inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.35 voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" static_layer: map_subscribe_transient_local: True always_send_full_costmap: True local_costmap_client: ros__parameters: use_sim_time: True local_costmap_rclcpp_node: ros__parameters: use_sim_time: True global_costmap: global_costmap: ros__parameters: update_frequency: 1.0 publish_frequency: 1.0 global_frame: map robot_base_frame: base_link use_sim_time: True robot_radius: 0.12 resolution: 0.05 track_unknown_space: true plugins: ["static_layer", "obstacle_layer", "inflation_layer"] obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" static_layer: plugin: "nav2_costmap_2d::StaticLayer" map_subscribe_transient_local: True inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.55 always_send_full_costmap: True global_costmap_client: ros__parameters: use_sim_time: True global_costmap_rclcpp_node: ros__parameters: use_sim_time: True map_server: ros__parameters: use_sim_time: True yaml_filename: "turtlebot3_world.yaml" map_saver: ros__parameters: use_sim_time: True save_map_timeout: 5000 free_thresh_default: 0.25 occupied_thresh_default: 0.65 map_subscribe_transient_local: False planner_server: ros__parameters: expected_planner_frequency: 20.0 use_sim_time: True planner_plugins: ["GridBased"] GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" tolerance: 0.5 use_astar: false allow_unknown: true planner_server_rclcpp_node: ros__parameters: use_sim_time: True recoveries_server: ros__parameters: costmap_topic: local_costmap/costmap_raw footprint_topic: local_costmap/published_footprint cycle_frequency: 10.0 recovery_plugins: ["spin", "back_up", "wait"] spin: plugin: "nav2_recoveries/Spin" back_up: plugin: "nav2_recoveries/BackUp" wait: plugin: "nav2_recoveries/Wait" global_frame: odom robot_base_frame: base_link transform_timeout: 0.1 use_sim_time: true simulate_ahead_time: 2.0 max_rotational_vel: 1.0 min_rotational_vel: 0.4 rotational_acc_lim: 3.2 robot_state_publisher: ros__parameters: use_sim_time: Truenav2launch文件配置如下
''' 作者: 小鱼 公众号: 鱼香ROS QQ交流群: 2642868461 描述: Nav2 launch启动文件 ''' import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): #=============================1.定位到包的地址============================================================= fishbot_navigation2_dir = get_package_share_directory('fishbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') #=============================2.声明参数,获取配置文件路径=================================================== # use_sim_time 这里要设置成true,因为gazebo是仿真环境,其时间是通过/clock话题获取,而不是系统时间 use_sim_time = LaunchConfiguration('use_sim_time', default='true') map_yaml_path = LaunchConfiguration('map',default=os.path.join(fishbot_navigation2_dir,'maps','fishbot_map.yaml')) nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(fishbot_navigation2_dir,'param','fishbot_nav2.yaml')) rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz') #=============================3.声明启动launch文件,传入:地图路径、是否使用仿真时间以及nav2参数文件============== nav2_bringup_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') return LaunchDescription([nav2_bringup_launch,rviz_node])运行保存地图命令后的log
doki@doki:~/fishbot_ws/src/fishbot_cartographer/map$ ros2 run nav2_map_server map_saver_cli -t map -f fishbot_map /opt/ros/foxy/bin/ros2:6: DeprecationWarning: pkg_resources is deprecated as an API. See https://setuptools.pypa.io/en/latest/pkg_resources.html from pkg_resources import load_entry_point 2024-04-15 13:35:07.235 [RTPS_TRANSPORT_SHM Error] Failed init_port fastrtps_port7419: open_and_lock_file failed -> Function open_port_internal [INFO] [1713159307.271350024] [map_saver]: map_saver lifecycle node launched. Waiting on external lifecycle transitions to activate See https://design.ros2.org/articles/node_lifecycle.html for more information. [INFO] [1713159307.271799476] [map_saver]: Creating [INFO] [1713159307.272066482] [map_saver]: Saving map from 'map' topic to 'fishbot_map' file [WARN] [1713159307.272093244] [map_saver]: Free threshold unspecified. Setting it to default value: 0.250000 [WARN] [1713159307.272109316] [map_saver]: Occupied threshold unspecified. Setting it to default value: 0.650000 [WARN] [map_io]: Image format unspecified. Setting it to: pgm [INFO] [map_io]: Received a 627 X 424 map @ 0.4 m/pix [INFO] [map_io]: Writing map occupancy data to fishbot_map.pgm [INFO] [map_io]: Writing map metadata to fishbot_map.yaml [INFO] [map_io]: Map saved [INFO] [1713159307.981907269] [map_saver]: Map saved successfully [INFO] [1713159307.982130604] [map_saver]: Destroyingrviz 的部分日志(太多了,```
[rviz2-10] [INFO] [1713159647.797478864] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.554 for reason 'Unknown'
[planner_server-5] [INFO] [1713159647.799202254] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159647.862795699] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 472.638 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.022436640] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.022596268] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.753 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.054023783] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 472.837 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.214593625] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.952 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.278110172] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.038 for reason 'Unknown'
[planner_server-5] [INFO] [1713159648.299271064] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159648.406450886] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.152 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.439731285] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159648.440915173] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159648.469438843] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.237 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.597485350] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.597642555] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.352 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.661936972] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.438 for reason 'Unknown'
[planner_server-5] [INFO] [1713159648.799237647] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159648.822041899] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.552 for reason 'Unknown'
[rviz2-10] [INFO] [1713159648.854357300] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.637 for reason 'Unknown'
[amcl-2] [WARN] [1713159648.863671605] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose...
[rviz2-10] [INFO] [1713159649.013832346] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.754 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.078166627] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.838 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.206504088] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.206787334] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.951 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.269529554] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.038 for reason 'Unknown'
[planner_server-5] [INFO] [1713159649.299290754] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159649.399012779] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.151 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.441700218] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159649.442619588] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159649.462482790] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.238 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.622652422] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.351 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.686002800] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.438 for reason 'Unknown'
[planner_server-5] [INFO] [1713159649.799189835] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159649.814223037] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.814709394] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.550 for reason 'Unknown'
[rviz2-10] [INFO] [1713159649.878791784] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.638 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.005417642] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.750 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.070341239] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.838 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.198511275] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.949 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.261945399] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.037 for reason 'Unknown'
[planner_server-5] [INFO] [1713159650.299247049] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159650.421914516] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.422045626] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.150 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.443113732] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159650.444083290] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159650.485644092] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.237 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.613620479] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.352 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.678198323] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.437 for reason 'Unknown'
[planner_server-5] [INFO] [1713159650.799244227] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159650.805600382] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.553 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.870276858] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.637 for reason 'Unknown'
[amcl-2] [WARN] [1713159650.882334554] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose...
[rviz2-10] [INFO] [1713159650.998285087] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159650.998422818] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.749 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.093894366] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.837 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.221625376] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.949 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.286049976] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.037 for reason 'Unknown'
[planner_server-5] [INFO] [1713159651.299249407] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159651.413803093] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.149 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.444867464] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159651.445873984] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159651.478551117] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.238 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.606442996] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.606746417] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.348 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.701941527] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.437 for reason 'Unknown'
[rviz2-10] [INFO] [1713159651.797544944] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.547 for reason 'Unknown'
[planner_server-5] [INFO] [1713159651.799309499] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159651.894219467] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.638 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.021925720] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.748 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.085431324] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.838 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.214032369] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.214224830] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.947 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.278332345] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.037 for reason 'Unknown'
[planner_server-5] [INFO] [1713159652.299237975] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159652.406072540] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.146 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.446284509] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159652.447689916] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159652.501870393] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.238 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.598241486] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.345 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.693494315] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.438 for reason 'Unknown'
[planner_server-5] [INFO] [1713159652.799344432] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159652.822452165] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.822896275] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.546 for reason 'Unknown'
[rviz2-10] [INFO] [1713159652.886226420] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.637 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.014130858] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.746 for reason 'Unknown'
[amcl-2] [WARN] [1713159653.108456455] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose...
[rviz2-10] [INFO] [1713159653.110023775] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.837 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.206759680] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.945 for reason 'Unknown'
[planner_server-5] [INFO] [1713159653.299191104] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159653.301679760] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.037 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.397709834] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.397828950] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.145 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.448269136] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10] [INFO] [1713159653.449045781] [rviz2]: Sending lifecycle_manager_navigation/is_active request
[rviz2-10] [INFO] [1713159653.495060844] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.238 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.621509719] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.344 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.686319605] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.438 for reason 'Unknown'
[planner_server-5] [INFO] [1713159653.799207263] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-10] [INFO] [1713159653.813864847] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.543 for reason 'Unknown'
[rviz2-10] [INFO] [1713159653.909697860] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.637 for reason 'Unknown'
[rviz2-10] [INFO] [1713159654.006121477] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown'
[rviz2-10] [INFO] [1713159654.006264343] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.743 for reason 'Unknown'
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[bt_navigator-7] [INFO] [1713159654.099212964] [rclcpp]: signal_handler(signal_value=2)
[waypoint_follower-8] [INFO] [1713159654.099250860] [rclcpp]: signal_handler(signal_value=2)
[rviz2-10] [INFO] [1713159654.099260991] [rclcpp]: signal_handler(signal_value=2)
[rviz2-10] [INFO] [1713159654.099603561] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service...
[rviz2-10]
[rviz2-10] >>> [rcutils|error_handling.c:108] rcutils_set_error_state()
[rviz2-10] This error state is being overwritten:
[rviz2-10]
[rviz2-10] 'rcl node's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/node.c:441'
[rviz2-10]
[rviz2-10] with this new error message:
[rviz2-10]
[rviz2-10] 'the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/wait.c:130'
[rviz2-10]
[rviz2-10] rcutils_reset_error() should be called after error handling to avoid this.
[rviz2-10] <<<
[rviz2-10] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError'
[rviz2-10] what(): failed to initialize wait set: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/wait.c:130
[map_server-1] [INFO] [1713159654.099292247] [rclcpp]: signal_handler(signal_value=2)
[map_server-1] [INFO] [1713159654.102026209] [map_server]: Destroying
[lifecycle_manager-9] [INFO] [1713159654.099293681] [rclcpp]: signal_handler(signal_value=2)
[lifecycle_manager-9] [ERROR] [1713159654.101441635] [lifecycle_manager_navigation]: Failed to change state for node: planner_server
[lifecycle_manager-9] [ERROR] [1713159654.101501914] [lifecycle_manager_navigation]: Failed to bring up all requested nodes. Aborting bringup.
[lifecycle_manager-9] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError'
[lifecycle_manager-9] what(): Failed to create interrupt guard condition in Executor constructor: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/guard_condition.c:67
[lifecycle_manager-3] [INFO] [1713159654.099292959] [rclcpp]: signal_handler(signal_value=2)
[recoveries_server-6] [INFO] [1713159654.099298399] [rclcpp]: signal_handler(signal_value=2)
[INFO] [planner_server-5]: process has finished cleanly [pid 81383]
[planner_server-5] [INFO] [1713159654.099319352] [rclcpp]: signal_handler(signal_value=2)
[planner_server-5] [INFO] [1713159654.099924784] [global_costmap.global_costmap]: start
[planner_server-5] [ERROR] [1713159654.102255260] []: Caught exception in callback for transition 13
[INFO] [recoveries_server-6]: process has finished cleanly [pid 81385]
[amcl-2] [INFO] [1713159654.099359884] [rclcpp]: signal_handler(signal_value=2)
[controller_server-4] [INFO] [1713159654.099360150] [rclcpp]: signal_handler(signal_value=2)
[planner_server-5] [ERROR] [1713159654.102301003] []: Original error: could not create subscription: rcl node's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/node.c:441
[planner_server-5] [ERROR] [1713159654.102363423] []: Failed to finish transition 3. Current state is now: errorprocessing (Could not publish transition: publisher's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/publisher.c:423, at /tmp/binarydeb/ros-foxy-rcl-lifecycle-1.1.14/src/rcl_lifecycle.c:367)
[planner_server-5] [INFO] [1713159654.102388121] [planner_server]: Activating plugin GridBased of type NavfnPlanner
[planner_server-5] [ERROR] [1713159654.102407435] []: Failed to finish transition 3. Current state is now: active (Could not publish transition: publisher's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/publisher.c:423, at /tmp/binarydeb/ros-foxy-rcl-lifecycle-1.1.14/src/rcl_lifecycle.c:367)
[INFO] [controller_server-4]: process has finished cleanly [pid 81381]
[lifecycle_manager-3] [INFO] [1713159654.104235704] [lifecycle_manager_localization]: Destroying
[amcl-2] [INFO] [1713159654.105737279] [amcl]: Destroying
[bt_navigator-7] [INFO] [1713159654.105798507] [bt_navigator]: Destroying
[waypoint_follower-8] [INFO] [1713159654.106005618] [waypoint_follower]: Destroying
[INFO] [map_server-1]: process has finished cleanly [pid 81375]
[INFO] [lifecycle_manager-3]: process has finished cleanly [pid 81379]
[INFO] [waypoint_follower-8]: process has finished cleanly [pid 81389]
[INFO] [amcl-2]: process has finished cleanly [pid 81377]
[INFO] [bt_navigator-7]: process has finished cleanly [pid 81387]
[ERROR] [rviz2-10]: process has died [pid 81393, exit code -6, cmd '/opt/ros/foxy/lib/rviz2/rviz2 -d /home/doki/fishbot_ws/install/nav2_bringup/share/nav2_bringup/rviz/nav2_default_view.rviz --ros-args -r __node:=rviz2 --params-file /tmp/launch_params_gizwe1yi'].
[ERROR] [lifecycle_manager-9]: process has died [pid 81391, exit code -6, cmd '/home/doki/fishbot_ws/install/nav2_lifecycle_manager/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=lifecycle_manager_navigation --params-file /tmp/launch_params_xaxlgzon --params-file /tmp/launch_params_6ul_5qpx --params-file /tmp/launch_params_dbtoojxe']. -
@2475887309 在 cartographer保存图与rviz显示不一致,且在nav2中加载保存的图是一片白 中说:
rviz部分日志格式有问题,重发一下[rviz2-10] [INFO] [1713159647.797478864] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.554 for reason 'Unknown' [planner_server-5] [INFO] [1713159647.799202254] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159647.862795699] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 472.638 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.022436640] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.022596268] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.753 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.054023783] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 472.837 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.214593625] [rviz2]: Message Filter dropping message: frame 'odom' at time 472.952 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.278110172] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.038 for reason 'Unknown' [planner_server-5] [INFO] [1713159648.299271064] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159648.406450886] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.152 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.439731285] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159648.440915173] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159648.469438843] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.237 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.597485350] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.597642555] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.352 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.661936972] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.438 for reason 'Unknown' [planner_server-5] [INFO] [1713159648.799237647] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159648.822041899] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.552 for reason 'Unknown' [rviz2-10] [INFO] [1713159648.854357300] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.637 for reason 'Unknown' [amcl-2] [WARN] [1713159648.863671605] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose... [rviz2-10] [INFO] [1713159649.013832346] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.754 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.078166627] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 473.838 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.206504088] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.206787334] [rviz2]: Message Filter dropping message: frame 'odom' at time 473.951 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.269529554] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.038 for reason 'Unknown' [planner_server-5] [INFO] [1713159649.299290754] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159649.399012779] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.151 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.441700218] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159649.442619588] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159649.462482790] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.238 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.622652422] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.351 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.686002800] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.438 for reason 'Unknown' [planner_server-5] [INFO] [1713159649.799189835] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159649.814223037] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.814709394] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.550 for reason 'Unknown' [rviz2-10] [INFO] [1713159649.878791784] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.638 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.005417642] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.750 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.070341239] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 474.838 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.198511275] [rviz2]: Message Filter dropping message: frame 'odom' at time 474.949 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.261945399] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.037 for reason 'Unknown' [planner_server-5] [INFO] [1713159650.299247049] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159650.421914516] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.422045626] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.150 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.443113732] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159650.444083290] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159650.485644092] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.237 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.613620479] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.352 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.678198323] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.437 for reason 'Unknown' [planner_server-5] [INFO] [1713159650.799244227] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159650.805600382] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.553 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.870276858] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.637 for reason 'Unknown' [amcl-2] [WARN] [1713159650.882334554] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose... [rviz2-10] [INFO] [1713159650.998285087] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159650.998422818] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.749 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.093894366] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 475.837 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.221625376] [rviz2]: Message Filter dropping message: frame 'odom' at time 475.949 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.286049976] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.037 for reason 'Unknown' [planner_server-5] [INFO] [1713159651.299249407] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159651.413803093] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.149 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.444867464] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159651.445873984] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159651.478551117] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.238 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.606442996] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.606746417] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.348 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.701941527] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.437 for reason 'Unknown' [rviz2-10] [INFO] [1713159651.797544944] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.547 for reason 'Unknown' [planner_server-5] [INFO] [1713159651.799309499] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159651.894219467] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.638 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.021925720] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.748 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.085431324] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 476.838 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.214032369] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.214224830] [rviz2]: Message Filter dropping message: frame 'odom' at time 476.947 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.278332345] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.037 for reason 'Unknown' [planner_server-5] [INFO] [1713159652.299237975] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159652.406072540] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.146 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.446284509] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159652.447689916] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159652.501870393] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.238 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.598241486] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.345 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.693494315] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.438 for reason 'Unknown' [planner_server-5] [INFO] [1713159652.799344432] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159652.822452165] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.822896275] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.546 for reason 'Unknown' [rviz2-10] [INFO] [1713159652.886226420] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.637 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.014130858] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.746 for reason 'Unknown' [amcl-2] [WARN] [1713159653.108456455] [amcl]: ACML cannot publish a pose or update the transform. Please set the initial pose... [rviz2-10] [INFO] [1713159653.110023775] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 477.837 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.206759680] [rviz2]: Message Filter dropping message: frame 'odom' at time 477.945 for reason 'Unknown' [planner_server-5] [INFO] [1713159653.299191104] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159653.301679760] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.037 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.397709834] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.397828950] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.145 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.448269136] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [INFO] [1713159653.449045781] [rviz2]: Sending lifecycle_manager_navigation/is_active request [rviz2-10] [INFO] [1713159653.495060844] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.238 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.621509719] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.344 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.686319605] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.438 for reason 'Unknown' [planner_server-5] [INFO] [1713159653.799207263] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1713159653.813864847] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.543 for reason 'Unknown' [rviz2-10] [INFO] [1713159653.909697860] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 478.637 for reason 'Unknown' [rviz2-10] [INFO] [1713159654.006121477] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1713159654.006264343] [rviz2]: Message Filter dropping message: frame 'odom' at time 478.743 for reason 'Unknown' ^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT) [bt_navigator-7] [INFO] [1713159654.099212964] [rclcpp]: signal_handler(signal_value=2) [waypoint_follower-8] [INFO] [1713159654.099250860] [rclcpp]: signal_handler(signal_value=2) [rviz2-10] [INFO] [1713159654.099260991] [rclcpp]: signal_handler(signal_value=2) [rviz2-10] [INFO] [1713159654.099603561] [rviz2]: Waiting for the lifecycle_manager_navigation/is_active service... [rviz2-10] [rviz2-10] >>> [rcutils|error_handling.c:108] rcutils_set_error_state() [rviz2-10] This error state is being overwritten: [rviz2-10] [rviz2-10] 'rcl node's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/node.c:441' [rviz2-10] [rviz2-10] with this new error message: [rviz2-10] [rviz2-10] 'the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/wait.c:130' [rviz2-10] [rviz2-10] rcutils_reset_error() should be called after error handling to avoid this. [rviz2-10] <<< [rviz2-10] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError' [rviz2-10] what(): failed to initialize wait set: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/wait.c:130 [map_server-1] [INFO] [1713159654.099292247] [rclcpp]: signal_handler(signal_value=2) [map_server-1] [INFO] [1713159654.102026209] [map_server]: Destroying [lifecycle_manager-9] [INFO] [1713159654.099293681] [rclcpp]: signal_handler(signal_value=2) [lifecycle_manager-9] [ERROR] [1713159654.101441635] [lifecycle_manager_navigation]: Failed to change state for node: planner_server [lifecycle_manager-9] [ERROR] [1713159654.101501914] [lifecycle_manager_navigation]: Failed to bring up all requested nodes. Aborting bringup. [lifecycle_manager-9] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError' [lifecycle_manager-9] what(): Failed to create interrupt guard condition in Executor constructor: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/guard_condition.c:67 [lifecycle_manager-3] [INFO] [1713159654.099292959] [rclcpp]: signal_handler(signal_value=2) [recoveries_server-6] [INFO] [1713159654.099298399] [rclcpp]: signal_handler(signal_value=2) [INFO] [planner_server-5]: process has finished cleanly [pid 81383] [planner_server-5] [INFO] [1713159654.099319352] [rclcpp]: signal_handler(signal_value=2) [planner_server-5] [INFO] [1713159654.099924784] [global_costmap.global_costmap]: start [planner_server-5] [ERROR] [1713159654.102255260] []: Caught exception in callback for transition 13 [INFO] [recoveries_server-6]: process has finished cleanly [pid 81385] [amcl-2] [INFO] [1713159654.099359884] [rclcpp]: signal_handler(signal_value=2) [controller_server-4] [INFO] [1713159654.099360150] [rclcpp]: signal_handler(signal_value=2) [planner_server-5] [ERROR] [1713159654.102301003] []: Original error: could not create subscription: rcl node's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/node.c:441 [planner_server-5] [ERROR] [1713159654.102363423] []: Failed to finish transition 3. Current state is now: errorprocessing (Could not publish transition: publisher's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/publisher.c:423, at /tmp/binarydeb/ros-foxy-rcl-lifecycle-1.1.14/src/rcl_lifecycle.c:367) [planner_server-5] [INFO] [1713159654.102388121] [planner_server]: Activating plugin GridBased of type NavfnPlanner [planner_server-5] [ERROR] [1713159654.102407435] []: Failed to finish transition 3. Current state is now: active (Could not publish transition: publisher's context is invalid, at /tmp/binarydeb/ros-foxy-rcl-1.1.14/src/rcl/publisher.c:423, at /tmp/binarydeb/ros-foxy-rcl-lifecycle-1.1.14/src/rcl_lifecycle.c:367) [INFO] [controller_server-4]: process has finished cleanly [pid 81381] [lifecycle_manager-3] [INFO] [1713159654.104235704] [lifecycle_manager_localization]: Destroying [amcl-2] [INFO] [1713159654.105737279] [amcl]: Destroying [bt_navigator-7] [INFO] [1713159654.105798507] [bt_navigator]: Destroying [waypoint_follower-8] [INFO] [1713159654.106005618] [waypoint_follower]: Destroying [INFO] [map_server-1]: process has finished cleanly [pid 81375] [INFO] [lifecycle_manager-3]: process has finished cleanly [pid 81379] [INFO] [waypoint_follower-8]: process has finished cleanly [pid 81389] [INFO] [amcl-2]: process has finished cleanly [pid 81377] [INFO] [bt_navigator-7]: process has finished cleanly [pid 81387] [ERROR] [rviz2-10]: process has died [pid 81393, exit code -6, cmd '/opt/ros/foxy/lib/rviz2/rviz2 -d /home/doki/fishbot_ws/install/nav2_bringup/share/nav2_bringup/rviz/nav2_default_view.rviz --ros-args -r __node:=rviz2 --params-file /tmp/launch_params_gizwe1yi']. [ERROR] [lifecycle_manager-9]: process has died [pid 81391, exit code -6, cmd '/home/doki/fishbot_ws/install/nav2_lifecycle_manager/lib/nav2_lifecycle_manager/lifecycle_manager --ros-args -r __node:=lifecycle_manager_navigation --params-file /tmp/launch_params_xaxlgzon --params-file /tmp/launch_params_6ul_5qpx --params-file /tmp/launch_params_dbtoojxe']. -
@2475887309 大概知道什么情况了,是launch文件中配置地图分辨率的值比较大,导致生成的图没有黑色线,将地图分辨率改为0.01恢复正常了