Python调用'/gazebo/set_link_state'发生AttributeError
-
**## 标题:**Python代码调用get_link_state和set_link_state
**### 背景:**在ros-melodic-gazebo9仿真环境里有一个运动中的机器人,为了使它在base_link运动过程中其末端link仍然保持在当前世界位置并相对世界坐标静止,我用了下述Python代码调用get_link_state和set_link_state,首先获取当前的位姿,然后循环执行set link state的服务。
**### 问题描述:**以下是完整的脚本:
#!/usr/bin/env python import rospy from gazebo_msgs.srv import GetLinkState, GetLinkStateRequest, SetLinkState, SetLinkStateRequest from geometry_msgs.msg import Pose, Point, Quaternion from std_msgs.msg import Header def get_current_pose(link_name): """ 获取指定链接的当前位姿。 :param link_name: 要获取位姿的链接名称 :return: 当前位姿的Pose对象 """ rospy.wait_for_service('/gazebo/get_link_state') try: get_link_state_service = rospy.ServiceProxy('/gazebo/get_link_state', GetLinkState) get_link_state_request = GetLinkStateRequest() get_link_state_request.link_name = link_name get_link_state_request.reference_frame = 'world' response = get_link_state_service(get_link_state_request) return response.pose except rospy.ServiceException as e: print("获取链接状态服务调用失败: %s"%e) def set_link_state(link_name, pose): """ 设置链接状态,使指定的链接相对于世界保持静止。 :param link_name: 要设置状态的链接名称 :param pose: 设置的位姿,这里我们将位置和方向都设置为0 """ rospy.wait_for_service('/gazebo/set_link_state') try: set_link_state_service = rospy.ServiceProxy('/gazebo/set_link_state', SetLinkState) set_link_state_request = SetLinkStateRequest() # 设置请求头信息 set_link_state_request.header = Header() set_link_state_request.header.stamp = rospy.Time.now() set_link_state_request.header.frame_id = 'world' # 设置链接名称 set_link_state_request.link_name = link_name # 设置目标位姿 set_link_state_request.pose = pose # 设置角速度和线速度为0 set_link_state_request.twist.linear.x = 0 set_link_state_request.twist.linear.y = 0 set_link_state_request.twist.linear.z = 0 set_link_state_request.twist.angular.x = 0 set_link_state_request.twist.angular.y = 0 set_link_state_request.twist.angular.z = 0 # 发送请求并等待响应 response = set_link_state_service(set_link_state_request) return response.success except rospy.ServiceException as e: print("设置链接状态服务调用失败: %s"%e) if __name__ == '__main__': # 初始化ROS节点 rospy.init_node('keep_link_static_example') # 设置要保持静止的链接名称 link_name = 'mobile_link' # 这里替换为目标链接名称 rate = rospy.Rate(10) # 设置循环频率为10Hz while not rospy.is_shutdown(): # 获取当前位姿 current_pose = get_current_pose(link_name) if current_pose: # 创建一个Pose消息,将位置和方向都设置为当前值 pose = Pose() pose.position = current_pose.position pose.orientation = current_pose.orientation # 调用函数设置链接状态 success = set_link_state(link_name, pose) # 打印结果 if success: print("链接 '%s' 设置为相对于世界静止成功。" % link_name) else: print("链接 '%s' 设置为相对于世界静止失败。" % link_name) else: print("无法获取链接 '%s' 的当前位姿。" % link_name) rate.sleep() # 根据设定的循环频率休眠附英文版
#!/usr/bin/env python import rospy from gazebo_msgs.srv import GetLinkState, GetLinkStateRequest, SetLinkState, SetLinkStateRequest from geometry_msgs.msg import Pose, Point, Quaternion from std_msgs.msg import Header def get_current_pose(link_name): """ Get the current pose of the specified link. :param link_name: The name of the link to get the pose for :return: The current pose of the link as a Pose object """ rospy.wait_for_service('/gazebo/get_link_state') try: get_link_state_service = rospy.ServiceProxy('/gazebo/get_link_state', GetLinkState) get_link_state_request = GetLinkStateRequest() get_link_state_request.link_name = link_name get_link_state_request.reference_frame = 'world' response = get_link_state_service(get_link_state_request) return response.pose except rospy.ServiceException as e: print("Failed to call get link state service: %s"%e) def set_link_state(link_name, pose): """ Set the state of the specified link to keep it static relative to the world. :param link_name: The name of the link to set the state for :param pose: The desired pose, here we set all position and orientation components to 0 """ rospy.wait_for_service('/gazebo/set_link_state') try: set_link_state_service = rospy.ServiceProxy('/gazebo/set_link_state', SetLinkState) set_link_state_request = SetLinkStateRequest() # Set request header information set_link_state_request.header = Header() set_link_state_request.header.stamp = rospy.Time.now() set_link_state_request.header.frame_id = 'world' # Set the link name set_link_state_request.link_name = link_name # Set the target pose set_link_state_request.pose = pose # Set the angular and linear velocities to 0 set_link_state_request.twist.linear.x = 0 set_link_state_request.twist.linear.y = 0 set_link_state_request.twist.linear.z = 0 set_link_state_request.twist.angular.x = 0 set_link_state_request.twist.angular.y = 0 set_link_state_request.twist.angular.z = 0 # Send the request and wait for the response response = set_link_state_service(set_link_state_request) return response.success except rospy.ServiceException as e: print("Failed to call set link state service: %s"%e) if __name__ == '__main__': # Initialize the ROS node rospy.init_node('keep_link_static_example') # Set the link name to keep it static link_name = 'mobile_link' # Replace with the name of the link intended to be static rate = rospy.Rate(10) # Set the loop frequency to 10Hz while not rospy.is_shutdown(): # Get the current pose of the link current_pose = get_current_pose(link_name) if current_pose: # Create a Pose message with all position and orientation components set to the current values pose = Pose() pose.position = current_pose.position pose.orientation = current_pose.orientation # Call the function to set the link state success = set_link_state(link_name, pose) # Print the result if success: print("Link '%s' set to static relative to the world successfully." % link_name) else: print("Failed to set link '%s' to static relative to the world." % link_name) else: print("Could not get the current pose of link '%s'." % link_name) rate.sleep() # Sleep based on the set loop frequency但在运行中出现许多类似的报错,经过多次反复修改依然无果,在此请教各位。报错举例(截取关键行):
AttributeError: 'SetLinkStateRequest' object has no attribute 'link_name'
AttributeError: 'SetLinkStateRequest' object has no attribute 'header'
AttributeError: 'GetLinkStateResponse' object has no attribute 'position'
AttributeError: 'GetLinkStateResponse' object has no attribute 'pose'
### 具体细节和上下文:
完整报错举例如下:Traceback (most recent call last): File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 73, in <module> current_pose = get_current_pose(link_name) File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 22, in get_current_pose return response.pose AttributeError: 'GetLinkStateResponse' object has no attribute 'pose'Traceback (most recent call last): File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 77, in <module> pose.position = current_pose.position AttributeError: 'GetLinkStateResponse' object has no attribute 'position'Traceback (most recent call last): File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 81, in <module> success = set_link_state(link_name, pose) File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 39, in set_link_state set_link_state_request.header = Header() AttributeError: 'SetLinkStateRequest' object has no attribute 'header'Traceback (most recent call last): File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 82, in <module> success = set_link_state(link_name, pose) File "/home/hyh/catkin_ws/src/bigmama0225_py/scripts/fix_link_pose0502.py", line 45, in set_link_state set_link_state_request.link_name = link_name AttributeError: 'SetLinkStateRequest' object has no attribute 'link_name'都是致命报错,但我还是觉得该思路是最有希望的道路,因为之前试着用Python调用set_model_state能成功实现让机器人整体模型frame悬在空中(gravity=true条件下),下面附上调set_model_state服务的代码:
#!/usr/bin/env python #coding=utf-8 from gazebo_msgs.srv import GetModelState, SetModelState import rospy from gazebo_msgs.msg import ModelState from geometry_msgs.msg import Pose, Point, Quaternion from gazebo_msgs.srv import * # Initialize ROS node rospy.init_node('set_model_state_fixed') # Wait for Gazebo services to start rospy.wait_for_service('/gazebo/get_model_state') rospy.wait_for_service('/gazebo/set_model_state') # Create GetModelState service proxy get_model_state_proxy = rospy.ServiceProxy('/gazebo/get_model_state', GetModelState) # Create SetModelState service proxy set_model_state_proxy = rospy.ServiceProxy('/gazebo/set_model_state', SetModelState) # Get the current state of the model model_name = 'robot' # Replace with your model name reference_frame= 'world' current_state = get_model_state_proxy(model_name,reference_frame) # Set the new model state to keep the model fixed in its current position model_state = ModelState() model_state.model_name = model_name model_state.pose = current_state.pose # Keep the current position # Set the linear and angular velocities of the model to zero #model_state.twist = Twist(linear=Vector3(x=0.0, y=0.0, z=0.0), angular=Vector3(x=0.0, y=0.0, z=0.0)) model_state.twist.linear.x = 0.0 model_state.twist.linear.y = 0.0 model_state.twist.linear.z = 0.0 model_state.twist.angular.x = 0.0 model_state.twist.angular.y = 0.0 model_state.twist.angular.z = 0.0 model_state.reference_frame = 'world' # Call the SetModelState service to set the model state set_model_state_proxy(model_state) # Output result print("Model state set successfully, model is now fixed in its current position.") # To ensure that the model stays fixed in its current position in future updates, we need to continuously call the SetModelState service # This can be done using a loop or other logic based on your specific requirements while not rospy.is_shutdown(): set_model_state_proxy(model_state) rospy.sleep(0.01) # Sleep for 0.01 second, adjust frequency as needed### 尝试过的解决方法:
代码部分试着删过报错中提到的各个参量,结果参量全删完了还用个毛。然后仿真部分为了让特定的link固定在管壁上试过(ros-melodic环境下)apply_body_wrench,grasp_fix_plugin,摩擦mu1mu2给到100了还是会滑移,也试过换Ubuntu22.04+RosHumble+gazebo11环境里用 apply_link_force, ros2_grasping(https://github.com/IFRA-Cranfield/ros2_RobotSimulation/tree/foxy/ros2_grasping),ros2_LinkAttacher(https://github.com/IFRA-Cranfield/IFRA_LinkAttacher),都是只能在静态时稳定,base_link那端一抬起来整个模型就飞掉最后坍缩到世界原点处。
最后还是回到ROS-melodic里面舒服点,我这VM17的虚拟机跑ros-humble跑的提心吊胆的,时不时就给你崩一下子真受不了。在座的各位前辈大神有没有用过set_link_state服务,救救我谢谢了。 -
@3436845452
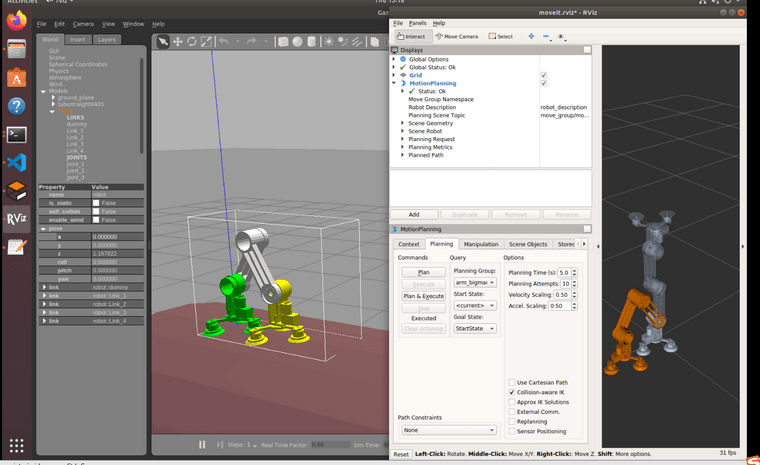 问题里提到的robot长这个样,想人为固定住末端mobile_link(黄色),然后通过相对运动把base_link(绿色)抬起来翻过去。
问题里提到的robot长这个样,想人为固定住末端mobile_link(黄色),然后通过相对运动把base_link(绿色)抬起来翻过去。 -
@3436845452 终端输入 rostopic list
返回里包含有/gazebo/set_link_state, 完整返回字段如下:/arm_position_controller/command /arm_position_controller/follow_joint_trajectory/cancel /arm_position_controller/follow_joint_trajectory/feedback /arm_position_controller/follow_joint_trajectory/goal /arm_position_controller/follow_joint_trajectory/result /arm_position_controller/follow_joint_trajectory/status /arm_position_controller/state /attached_collision_object /clock /collision_object /execute_trajectory/cancel /execute_trajectory/feedback /execute_trajectory/goal /execute_trajectory/result /execute_trajectory/status /gazebo/link_states /gazebo/model_states /gazebo/parameter_descriptions /gazebo/parameter_updates /gazebo/set_link_state /gazebo/set_model_state /joint_states /move_group/cancel /move_group/display_contacts /move_group/display_cost_sources /move_group/display_grasp_markers /move_group/display_planned_path /move_group/feedback /move_group/goal /move_group/monitored_planning_scene /move_group/motion_plan_request /move_group/ompl/parameter_descriptions /move_group/ompl/parameter_updates /move_group/plan_execution/parameter_descriptions /move_group/plan_execution/parameter_updates /move_group/planning_scene_monitor/parameter_descriptions /move_group/planning_scene_monitor/parameter_updates /move_group/result /move_group/sense_for_plan/parameter_descriptions /move_group/sense_for_plan/parameter_updates /move_group/status /move_group/trajectory_execution/parameter_descriptions /move_group/trajectory_execution/parameter_updates /pickup/cancel /pickup/feedback /pickup/goal /pickup/result /pickup/status /place/cancel /place/feedback /place/goal /place/result /place/status /planning_scene /planning_scene_world /recognized_object_array /rosout /rosout_agg /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full /rviz_ubuntu_38423_7706691175209945188/motionplanning_planning_scene_monitor/parameter_descriptions /rviz_ubuntu_38423_7706691175209945188/motionplanning_planning_scene_monitor/parameter_updates /tf /tf_static /trajectory_execution_event -
@3436845452 终端单纯命令调用rosservice call gazebo/get_link_state '{link_name: Link_3}'可以正常返回
link_state: link_name: "Link_3" pose: position: x: -0.0169728441434 y: -0.239294662543 z: 1.27101571602 orientation: x: 0.506675069487 y: -0.506605807831 z: 0.493296103713 w: -0.493244243244 twist: linear: x: 0.00139357024937 y: 0.000851167082131 z: -0.00139001604216 angular: x: -0.00435862833302 y: 0.00725633894658 z: 6.4154873921e-05 reference_frame: '' success: True status_message: "GetLinkState: got state" -
通宵跑通了,下面是改好的两款,一个是get一次然后循环set,第二个是循环get and set:
#!/usr/bin/env python #coding=utf-8 import rospy import geometry_msgs.msg from gazebo_msgs.msg import LinkState from gazebo_msgs.srv import GetLinkState, GetLinkStateRequest, SetLinkState, SetLinkStateRequest from geometry_msgs.msg import Pose, Point, Quaternion, Twist from std_msgs.msg import Header def get_current_state(link_name): """ Get the current pose of the specified link. :param link_name: The name of the link to get the pose for :return: The current pose of the link as a Pose object """ rospy.wait_for_service('/gazebo/get_link_state') try: get_link_state_service = rospy.ServiceProxy('/gazebo/get_link_state', GetLinkState) get_link_state_request = GetLinkStateRequest() get_link_state_request.link_name = link_name get_link_state_request.reference_frame = 'world' response = get_link_state_service(get_link_state_request) return response except rospy.ServiceException as e: print("Failed to call get link state service: %s"%e) def set_link_state(link_name, poseinput): """ Set the state of the specified link to keep it static relative to the world. :param link_name: The name of the link to set the state for :param pose: The desired pose, here we set all position and orientation components to 0 """ rospy.wait_for_service('/gazebo/set_link_state') try: set_link_state_service = rospy.ServiceProxy('/gazebo/set_link_state', SetLinkState) set_link_state_request = SetLinkStateRequest() # Set the link name set_link_state_request.link_state.link_name = link_name set_link_state_request.link_state.reference_frame = 'world' # Set the target pose set_link_state_request.link_state.pose = poseinput # Set the angular and linear velocities to 0 set_link_state_request.link_state.twist = geometry_msgs.msg.Twist(linear= geometry_msgs.msg.Vector3( x = 0, y = 0, z = 0), angular = geometry_msgs.msg.Vector3( x = 0, y = 0, z = 0)) #set_link_state_request.twist.linear.x = 0 #set_link_state_request.twist.linear.y = 0 #set_link_state_request.twist.linear.z = 0 #set_link_state_request.twist.angular.x = 0 #set_link_state_request.twist.angular.y = 0 #set_link_state_request.twist.angular.z = 0 # Send the request and wait for the response result = set_link_state_service(set_link_state_request) return result except rospy.ServiceException as e: print("Failed to call set link state service: %s"%e) if __name__ == '__main__': # Initialize the ROS node rospy.init_node('keep_link_static_example') # Set the link name to keep it static link_name = 'Link_3' # Replace with the name of the link you want to keep static # Get the current pose of the link current_state = get_current_state(link_name) poseoutput = Pose() poseoutput.position.x = current_state.link_state.pose.position.x poseoutput.position.y = current_state.link_state.pose.position.y poseoutput.position.z = current_state.link_state.pose.position.z poseoutput.orientation.w = current_state.link_state.pose.orientation.w poseoutput.orientation.x = current_state.link_state.pose.orientation.x poseoutput.orientation.y = current_state.link_state.pose.orientation.y poseoutput.orientation.z = current_state.link_state.pose.orientation.z rate = rospy.Rate(50) # Set the loop frequency to 50Hz while not rospy.is_shutdown(): if current_state: # Create a Pose message with all position and orientation components set to the current values # Call the function to set the link state success = set_link_state(link_name, poseoutput) # Print the result if success: print("Link '%s' set to static relative to the world successfully." % link_name) else: print("Failed to set link '%s' to static relative to the world." % link_name) else: print("Could not get the current pose of link '%s'." % link_name) rate.sleep() # Sleep based on the set loop frequency第二个:
#!/usr/bin/env python #coding=utf-8 from gazebo_msgs.srv import GetLinkState, SetLinkState import rospy from gazebo_msgs.msg import LinkState from geometry_msgs.msg import Pose, Point, Quaternion from gazebo_msgs.srv import * # Initialize ROS node rospy.init_node('set_link_state_fixed') # Wait for Gazebo services to start rospy.wait_for_service('/gazebo/get_link_state') rospy.wait_for_service('/gazebo/set_link_state') # Create GetLinkState service proxy get_link_state_proxy = rospy.ServiceProxy('/gazebo/get_link_state', GetLinkState) # Create SetLinkState service proxy set_link_state_proxy = rospy.ServiceProxy('/gazebo/set_link_state', SetLinkState) # Get the current state of the link link_name = 'Link_3' # Replace with your link name reference_frame= 'world' current_state = get_link_state_proxy(link_name,reference_frame) # Set the new link state to keep the link fixed in its current position link_state = LinkState() link_state.link_name = link_name link_state.pose = current_state.link_state.pose # Keep the current position # Set the linear and angular velocities of the link to zero #link_state.twist = Twist(linear=Vector3(x=0.0, y=0.0, z=0.0), angular=Vector3(x=0.0, y=0.0, z=0.0)) link_state.twist.linear.x = 0.0 link_state.twist.linear.y = 0.0 link_state.twist.linear.z = 0.0 link_state.twist.angular.x = 0.0 link_state.twist.angular.y = 0.0 link_state.twist.angular.z = 0.0 link_state.reference_frame = 'world' # Call the SetlinkState service to set the link state set_link_state_proxy(link_state) # Output result print("link state set successfully, link is now fixed in its current position.") # To ensure that the link stays fixed in its current position in future updates, we need to continuously call the SetlinkState service # This can be done using a loop or other logic based on your specific requirements while not rospy.is_shutdown(): set_link_state_proxy(link_state) rospy.sleep(0.002) # Sleep for 0.002 second, adjust frequency as needed