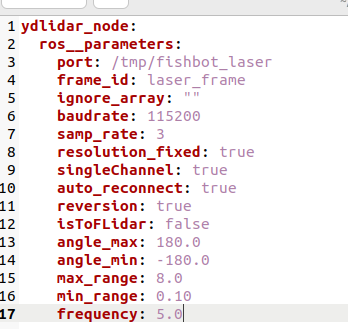
在无线驱动雷达中无法修改/tmp/fishbot_laser 文件的权限
-
目的是通过虚拟串口驱动雷达。
 yuhanglei@yuhanglei-virtual-machine:~$ python3 test.py
yuhanglei@yuhanglei-virtual-machine:~$ python3 test.py
UART2SOCKET:8889->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('192.168.15.131', 8889), raddr=('192.168.15.173', 65002)> 4
PTY: Opened /dev/pts/1 for 0.0.0.0:8889
显示虚拟串口已经建立成功
已经修改串口编号,编译也没问题,

但是无法修改权限
雷达板子是WIFI模式
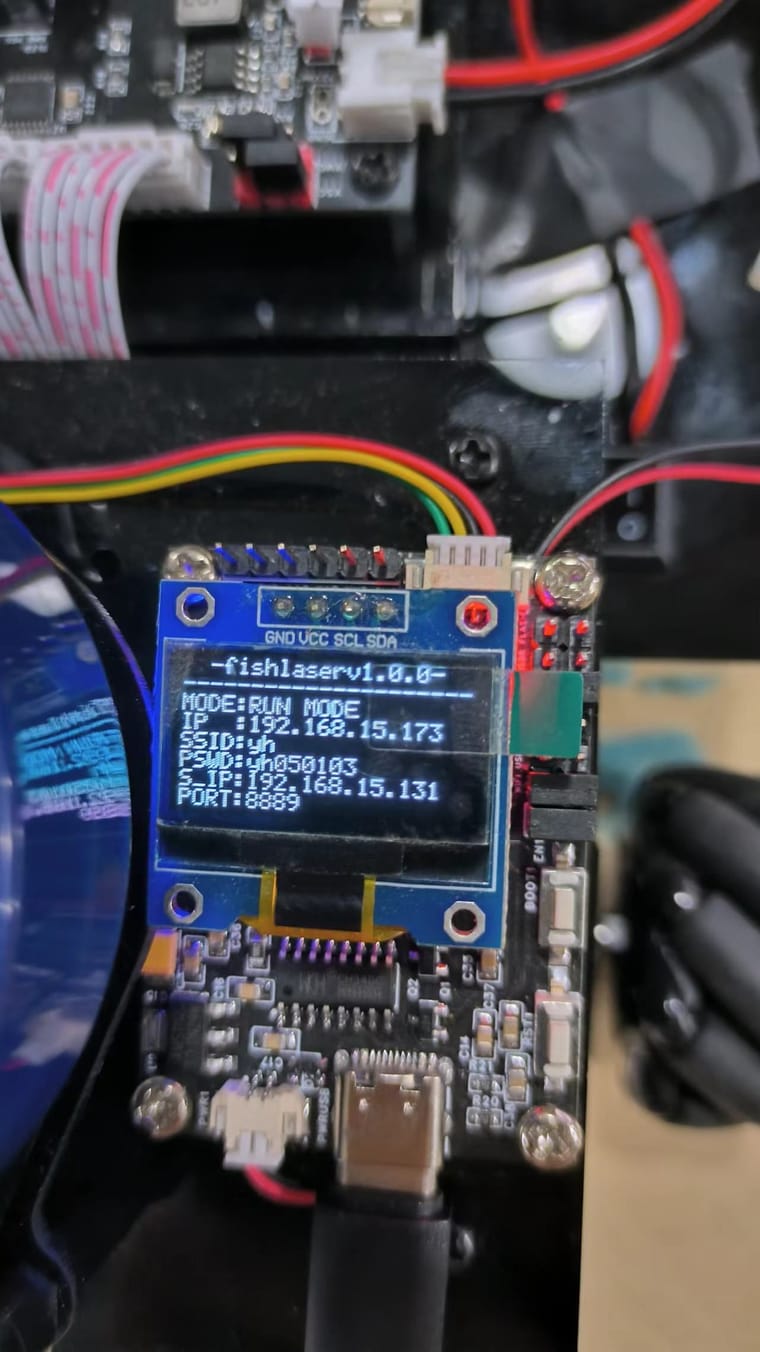
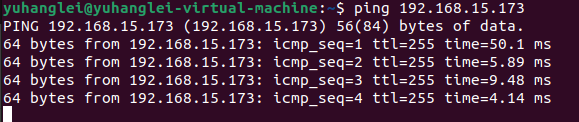
可以ping通 -
已经解决,无需修改权限,直接运行就行