cartographer一键安装后编译报错
-

-
cartographer是一个开源的实时 SLAM (Simultaneous Localization and Mapping) 系统,广泛用于机器人和自动驾驶领域。如果你在尝试一键安装cartographer后遇到编译报错,这里有几个可能的解决步骤和检查点:-
检查依赖项:
确保所有必要的依赖项都已正确安装。cartographer需要许多依赖库,如Ceres Solver、Protobuf、gflags、glog、Boost、Eigen等。你可以查看cartographer的官方文档或README.md文件来了解完整的依赖列表。 -
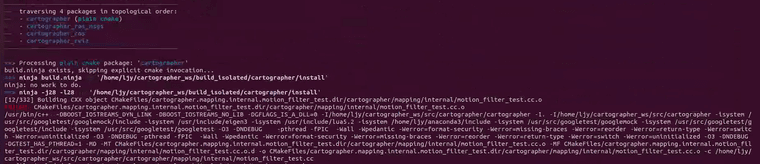
查看编译错误:
详细阅读编译时的错误输出。通常,错误信息会指出问题所在,比如缺少某个头文件、链接错误或代码中的语法错误。 -
检查 CMake 配置:
确保 CMake 的配置正确。你可以使用 CMake 的-DCMAKE_VERBOSE_MAKEFILE=ON选项来生成更详细的编译日志,这有助于诊断问题。mkdir build cd build cmake -DCMAKE_VERBOSE_MAKEFILE=ON .. make -
更新和重新安装依赖:
有时候,依赖库可能不是最新的,或者某些特定的版本之间存在不兼容。尝试更新或重新安装这些依赖库可能有助于解决问题。 -
检查源代码:
如果你从源代码编译cartographer,确保源代码是最新的,并且没有损坏。你可以从 GitHub 或其他源代码仓库拉取最新的代码。 -
环境问题:
检查你的开发环境(如编译器版本、操作系统等)是否满足cartographer的要求。有时候,旧版本的编译器或特定的操作系统设置可能会导致编译失败。 -
查看社区和文档:
cartographer的 GitHub 仓库和相关的社区论坛(如 Google Groups)是获取帮助的好地方。可能有人已经遇到了类似的问题,并分享了解决方案。 -
清理和重新构建:
在尝试上述步骤之前,清理旧的构建文件可能是一个好主意。你可以删除build目录并重新运行 CMake 配置和构建过程。rm -rf build mkdir build cd build cmake .. make -
使用 Docker 或其他容器化技术:
如果你仍然遇到问题,并且想要一个干净、一致的环境来编译cartographer,你可以考虑使用 Docker。cartographer提供了 Docker 镜像,可以在不同的环境中提供一致的编译和运行环境。
如果上述步骤都不能解决你的问题,你可能需要更详细地描述你的错误消息,以便获得更具体的帮助。
以上为生成回答,仅供参考~
-