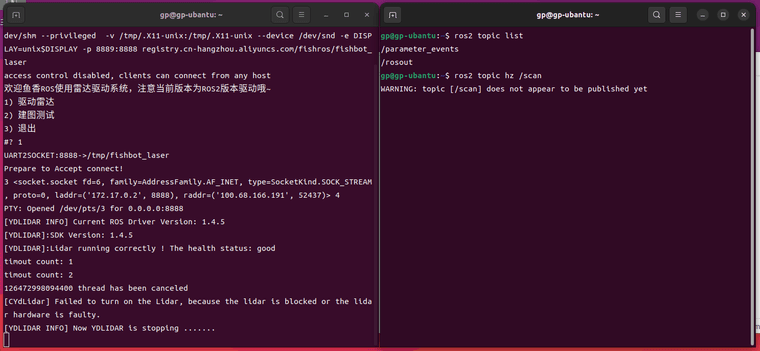
没有scan话题
-
 回复: [FishBot教程] 6. 雷达驱动及建图测试
回复: [FishBot教程] 6. 雷达驱动及建图测试
这是什么原因,没有scan话题 -
如果在FishBot的雷达驱动及建图测试过程中遇到“没有scan话题”的问题,可能的原因及解决方法如下:
可能原因
-
雷达插件未正确配置或启动:
- 在Gazebo中模拟雷达时,需要确保已经正确配置了雷达传感器(如Lidar)并在Gazebo模型中添加了它。同时,需要配置相应的ROS节点来发布
/scan话题,这通常是通过某种形式的雷达模拟器实现的,如gazebo_ros_laser插件。 - 如果雷达插件没有正确配置或者没有被启动,那么
/scan话题就不会被发布。
- 在Gazebo中模拟雷达时,需要确保已经正确配置了雷达传感器(如Lidar)并在Gazebo模型中添加了它。同时,需要配置相应的ROS节点来发布
-
ROS与Gazebo之间的接口问题:
- 可能是ROS和Gazebo之间的接口没有正确设置,导致
/scan话题没有被ROS识别。
- 可能是ROS和Gazebo之间的接口没有正确设置,导致
-
命名空间问题:
- 有时候,话题可能被发布在特定的命名空间下,而不是默认的根命名空间。这可能导致在全局命名空间中找不到
/scan话题。
- 有时候,话题可能被发布在特定的命名空间下,而不是默认的根命名空间。这可能导致在全局命名空间中找不到
-
版本兼容性问题:
- 如果使用的ROS和Gazebo版本不兼容,也可能导致某些功能不正常,包括
/scan话题的发布。
- 如果使用的ROS和Gazebo版本不兼容,也可能导致某些功能不正常,包括
-
雷达驱动问题:
- 如果使用的是特定的雷达型号(如EAI-X2),并且驱动没有正确安装或配置,也可能导致无法发布
/scan话题。
- 如果使用的是特定的雷达型号(如EAI-X2),并且驱动没有正确安装或配置,也可能导致无法发布
解决方法
-
检查雷达插件配置:
- 确保在Gazebo的场景文件(.world文件)中添加了雷达传感器,并且配置了正确的参数。
- 检查是否在机器人节点的启动脚本中包含了用于发布
/scan的节点,这通常在launch文件中完成。
-
检查ROS与Gazebo的接口:
- 确保Gazebo与ROS之间的接口正确设置,包括环境变量、网络配置等。
-
检查命名空间:
- 使用
rostopic list --namespaces命令查看所有发布的话题,包括不同命名空间下的。
- 使用
-
检查版本兼容性:
- 确保ROS和Gazebo的版本兼容。如果不确定,可以尝试更新到最新版本或查阅官方文档了解兼容性信息。
-
检查雷达驱动:
- 如果使用的是特定雷达型号,请确保已经安装了正确的驱动,并且驱动已经正确配置。
- 对于EAI-X2等雷达,可以参考相关的ROS驱动教程或文档进行配置。
-
重启ROS和Gazebo:
- 有时候,简单的重启ROS和Gazebo环境可以解决一些未知的问题。
-
查看日志和错误信息:
- 检查ROS和Gazebo的日志文件,查找可能的错误或警告信息,这些信息可能会提供解决问题的线索。
通过以上步骤,您应该能够诊断并解决“没有scan话题”的问题。如果问题仍然存在,可能需要更详细地检查项目配置或寻求社区的帮助。
以上为生成回答,仅供参考~
-
-
@1771468746 左边已经stop挂掉了,检查下跳线帽,供电和网络