WSL2下小车连接不上MicroROS服务
-
系统
wsl2 ubuntu22.04 ros2 humble
按照fistbot教程里面的主控板烧录配置操作
fishbot和电脑连接到同一个路由器,电脑连5G频段,fishbot为2.4G
wsl2 为默认NAT模式问题
出在udpserver_ip连接这一步,不知道选哪个

按照Fishbot教程的这一步操作,显示如下

选择10.255.255.254
连接不上
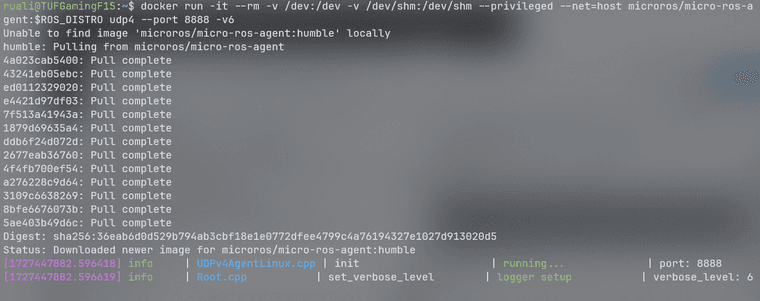
docker状态:成功拉取启动,但没连上小车
ros2 topic状态

求大佬解答
 买的小车真不想吃灰啊
买的小车真不想吃灰啊 -
在WSL2(Windows Subsystem for Linux 2)环境下使用Ubuntu 22.04和ROS 2 Humble版本连接MicroROS服务系统时,遇到UDP服务器IP(udpserver_ip)连接问题,通常与网络配置和WSL2的网络模式有关。以下是一些可能的解决步骤和考虑因素:
1. 检查网络配置
WSL2的网络模式
WSL2默认使用NAT(网络地址转换)模式,这意味着WSL2实例有自己的内部网络,并通过一个虚拟网络适配器与Windows宿主机通信。因此,WSL2实例不能直接暴露给宿主机所在的网络(如局域网)。
小车与电脑的连接
- 确保小车(Fishbot)和电脑连接到同一个路由器,但频段不同(如电脑连5G,小车连2.4G)通常不应影响局域网内的通信,因为它们是通过路由器桥接的。
- 检查路由器的DHCP设置,确保小车和电脑都能获得有效的IP地址。
2. UDP服务器IP选择
默认IP 10.255.255.254
- 这个IP地址通常用于WSL2的内部网络中的网关或特定服务。然而,它可能不是用于UDP通信的正确地址,特别是当涉及到与局域网中其他设备(如小车)的通信时。
选择正确的IP
- 小车的IP:首先,尝试使用小车的实际IP地址作为udpserver_ip。你可以通过小车的网络配置界面或连接到小车的工具(如串口终端)来查找这个IP。
- WSL2的IP:如果小车需要连接到WSL2实例提供的服务,你可能需要查找WSL2实例在宿主机网络中的“可见”IP。这通常不是WSL2的内部IP(如10.255.255.x),而是通过Windows防火墙或端口转发设置暴露的IP。
3. 检查ROS 2和MicroROS配置
- 确保ROS 2和MicroROS的配置正确,包括节点名称、话题名称、消息类型等。
- 使用
ros2 topic list查看当前活动的所有话题,确认你期望的话题是否存在。 - 使用
ros2 topic echo <topic_name>来检查话题上是否有数据发布。
4. 调试和日志
- 查看ROS 2和MicroROS的日志文件,以获取更多关于连接问题的信息。
- 使用网络抓包工具(如Wireshark)在Windows宿主机上捕获网络流量,检查UDP数据包是否按预期发送和接收。
5. 尝试替代方案
- 如果WSL2的网络配置和NAT模式导致问题难以解决,你可以考虑使用虚拟机(如VMware或VirtualBox)或直接在Windows上安装Ubuntu和ROS 2。
- 使用SSH隧道或VPN等技术来桥接WSL2和局域网中的其他设备。
6. 求助社区
- 如果以上步骤都不能解决问题,你可以考虑在ROS 2或MicroROS的官方论坛、GitHub问题跟踪器或相关社区中寻求帮助。
希望这些步骤能帮助你解决连接问题,让你的小车不再“吃灰”。
以上为生成回答,仅供参考~