ros noetic 在ur3机械臂上加装机械手后gazebo无法运动
-
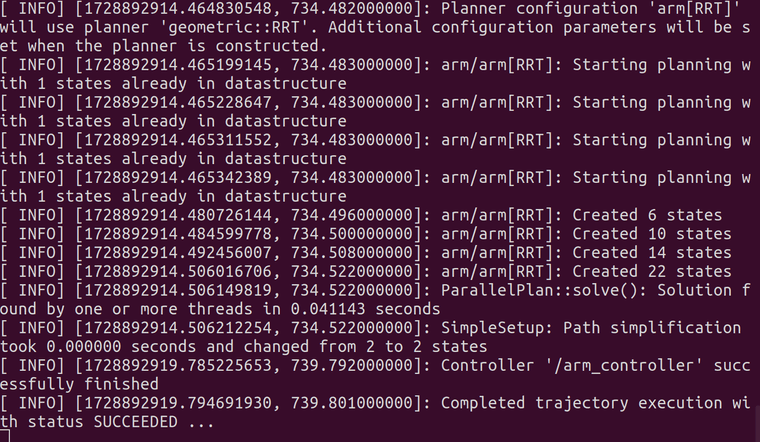
RT,我用ur3机械臂进行rviz与gazebo联合仿真时两个部分的模型是可以同步运动的,但是当我在ur3加上一个机械手后,再用moveit导出的包中进行rviz与gazebo联合仿真时,rviz是可以正常plan以及execute,但是gazebo的模型一动不动,输出结果如图所示。
想请教一下是哪个环节出了问题,应该不是通信的问题,可能是加上机械手后urdf模型出现了问题,但是我不知道该如何解决。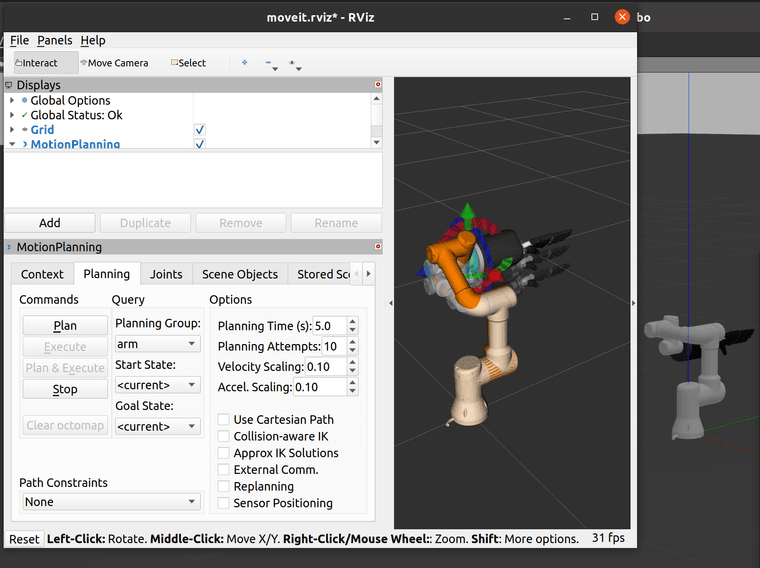
-
在ROS Noetic环境下,使用UR3机械臂加装机械手后,在Gazebo中进行仿真时遇到模型无法运动的问题,通常可能由以下几个环节引起:
1. URDF模型问题
问题描述:
URDF(Universal Robot Description Format)文件是描述机器人模型的关键文件,包括机械臂和机械手的几何形状、关节、链接等信息。加装机械手后,URDF文件需要正确更新以包含新添加的机械手部分。解决步骤:
- 检查URDF文件:确保URDF文件中正确描述了机械手的关节、链接以及它们与UR3机械臂的连接方式。
- 验证URDF文件:使用
check_urdf工具来验证URDF文件的完整性和正确性。 - 更新URDF文件:如果机械手具有特殊的关节类型(如Mimic关节),需要确保Gazebo插件支持这些关节类型,并在URDF文件中正确配置。
2. Gazebo插件和配置
问题描述:
Gazebo需要特定的插件来模拟机器人的物理行为,包括关节的运动、传感器的数据等。如果缺少必要的插件或配置不正确,可能导致模型无法运动。解决步骤:
- 安装必要的Gazebo插件:确保所有必要的Gazebo插件都已安装,并且与ROS Noetic兼容。
- 检查Gazebo配置文件(如
.launch文件和.world文件):确保这些文件正确引用了URDF文件,并且配置了正确的物理引擎和传感器。 - 调试Gazebo仿真:在Gazebo中运行仿真时,查看控制台输出以获取可能的错误信息或警告。
3. MoveIt配置
问题描述:
MoveIt是ROS中用于机器人运动规划和控制的框架。如果MoveIt的配置不正确,可能导致规划结果无法正确传递给Gazebo中的模型。解决步骤:
- 检查MoveIt配置文件(如
move_group.yaml和kinematics.yaml):确保这些文件正确配置了机械臂和机械手的运动学参数。 - 验证MoveIt规划:在RViz中运行MoveIt规划时,观察规划结果是否合理,并检查是否有任何错误或警告信息。
- 同步RViz和Gazebo:确保RViz和Gazebo之间的通信是同步的,并且MoveIt规划的结果能够正确传递给Gazebo。
4. 调试和日志分析
- 查看ROS日志:使用
roscore、roslaunch等命令运行仿真时,注意查看ROS的日志输出,以获取可能的错误信息或警告。 - 使用调试工具:如
rqt_logger_level来设置不同节点的日志级别,以便更详细地了解仿真过程中的问题。 - 逐步排查:如果问题复杂,可以尝试逐步排除法,先简化模型(如只使用UR3机械臂而不加机械手),然后逐步添加组件以找到问题的根源。
5. 资源和社区支持
- 查阅官方文档和教程:ROS和Gazebo的官方文档通常包含详细的安装、配置和调试指南。
- 搜索社区论坛和问答网站:如ROS Answers、CSDN博客等,这些平台上有大量关于ROS和Gazebo的问题和解决方案。
- 寻求专业帮助:如果问题难以解决,可以考虑寻求专业机构或开发者的帮助。
综上所述,解决UR3机械臂加装机械手后Gazebo无法运动的问题需要综合考虑URDF模型、Gazebo插件和配置、MoveIt配置以及调试和日志分析等多个方面。希望以上建议能对您有所帮助。
以上为生成回答,仅供参考~