使用camera-calibration进行相机标定时,launch起不来对应node,只创建了日志,但是没有输出
-
背景,需要进行相机雷达标定:按照这篇贴子的攻略在做
https://github.com/heethesh/lidar_camera_calibration目前卡在这里这一步
“运行 Camera Calibration
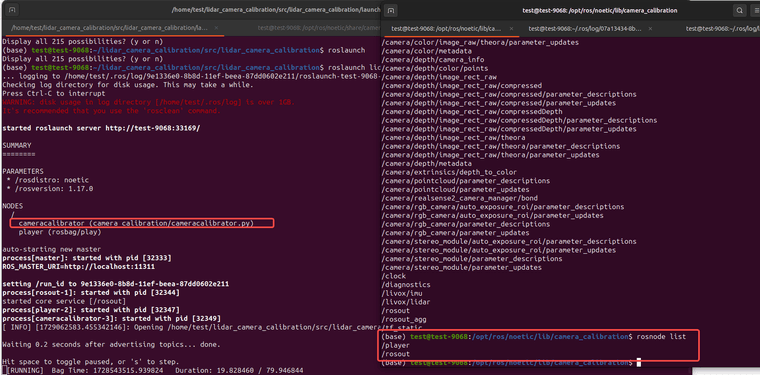
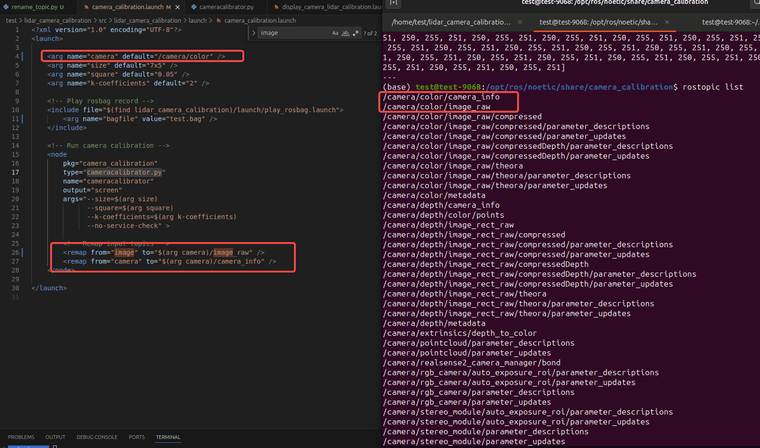
这个启动文件将播放 rosbag 记录并从 ROS 运行包。默认情况下,结果存储在 中。camera_calibration ~/.ros/camera_info“roslaunch lidar_camera_calibration camera_calibration.launch我录制的topic在相机传参的时候已经改写了名字,camera_calibration.launch源代码如下
<?xml version="1.0" encoding="UTF-8"?> <launch> <arg name="camera" default="/camera/color" /> <arg name="size" default="7x5" /> <arg name="square" default="0.05" /> <arg name="k-coefficients" default="2" /> <!-- Play rosbag record --> <include file="$(find lidar_camera_calibration)/launch/play_rosbag.launch"> <arg name="bagfile" value="test.bag" /> </include> <!-- Run camera calibration --> <node pkg="camera_calibration" type="cameracalibrator.py" name="cameracalibrator" output="screen" args="--size=$(arg size) --square=$(arg square) --k-coefficients=$(arg k-coefficients) --no-service-check" > <!-- Remap input topics --> <remap from="image" to="$(arg camera)/image_raw" /> <remap from="camera" to="$(arg camera)/camera_info" /> </node> </launch>异常有以下三点
1.并没有在~/.ros/里面看到camera_info的数据2.camera_calibration.launch运行的是时候理论上应该把cameracalibrator的node起起来,但是rosnode list里面并没有看到
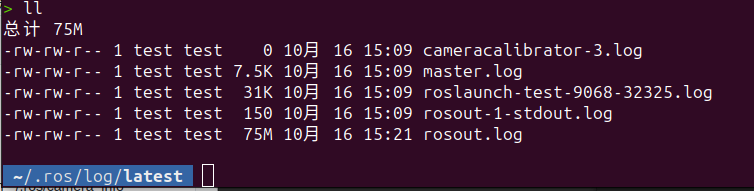
3,在~/.ros/log/latest路径下cameracalibrator-3.log有被创建,但是没有数据输出
已经尝试过的方法:
1.我尝试过在cameracalibrator.py里面输入打印日志的代码rospy.loginfo("start camera_calibration")但是rosout.log里面是没有对应输出的
2.重新catkin build 对应 lidar_camera_calibration工作空间,但是没有用
我个人猜测是这个node实际上没起来,但是debug不出来,请各位大佬指教一下
-
从你描述的情况来看,确实有几个可能的问题导致
cameracalibrator节点没有正常启动和运行。以下是一些步骤和建议,可以帮助你进行故障排除和解决问题:1. 检查 ROS 环境设置
确保你的 ROS 环境已经正确设置,包括 ROS 工作空间是否已经被正确编译(
catkin_make或catkin build),并且所有必要的依赖都已经安装。2. 检查节点名称和参数
- 确保
camera_calibration.launch文件中<arg>标签设置的参数值是你系统中实际存在的 topic 名称和值。 - 检查
cameracalibrator.py脚本是否确实接受你在 launch 文件中设置的参数(特别是那些被用作 remap 的参数)。
3. 检查 rosbag 播放
由于你的
play_rosbag.launch文件被包含在camera_calibration.launch中,确保:- rosbag 文件
test.bag确实存在且路径正确。 play_rosbag.launch文件是否正确无误地配置了所有必要的参数。
4. 查看节点启动错误
-
查看
~/.ros/log/latest/cameracalibrator-*.log文件的内容,可能会有更详细的错误信息。 -
使用
roslaunch命令时加上--screen选项来直接在终端显示输出,这有助于实时查看节点启动过程中的输出和错误信息。roslaunch --screen lidar_camera_calibration camera_calibration.launch
5. 检查 topic 连接
- 使用
rostopic list查看所有正在发布的 topic。 - 使用
rostopic echo /<topic_name>查看某个 topic 的具体内容,确保 camera 的 topic 确实有数据输出。 - 检查 camera topic 的名称和
camera_calibration.launch文件中设置的是否一致。
6. 调试脚本
- 如果
cameracalibrator.py是你自己修改的或不确定的,尝试用原始版本的脚本看是否能正常工作。 - 在
cameracalibrator.py中添加更多的rospy.loginfo()语句来跟踪执行流程。
7. 权限问题
- 确保你有足够的权限来读取 rosbag 文件和执行 Python 脚本。
8. ROS 版本兼容性
- 确保你的 ROS 版本与
camera_calibration包兼容。有时候,新版本的 ROS 可能不完全兼容旧版本的包。
通过以上步骤,你应该能够定位到问题的具体原因,并采取相应的措施来解决它。如果问题依然存在,可能需要更详细的日志信息或考虑向该包的开发者或社区寻求帮助。
以上为生成回答,仅供参考~
- 确保
-
@小伊
1.catkin build是正常使用的,
2.对应输入topic包里有数据,且名字也是能对应的
cameracalibrator.py 脚本是系统自带的,理论上同格式的应该会被接收,如果接受不了也不应该node起不来
3.路径正常,有数据,且播放的lunch不应该影响并列的node的启动吧
4.```
roslaunch lidar_camera_calibration camera_calibration.launch使用后,输出没有什么实际变化 5.上列已回,有数据,且与脚本对的上 6.rospy.loginfo()没有被打印出来 7.8. 路径为/opt/ros/noetic/lib/camera_calibration/cameracalibrator.py 脚本如下import cv2
import functools
import message_filters
import rospy
from camera_calibration.camera_calibrator import OpenCVCalibrationNode
from camera_calibration.calibrator import ChessboardInfo, Patterns
from message_filters import ApproximateTimeSynchronizerdef optionsValidCharuco(options, parser):
"""
Validates the provided options when the pattern type is 'charuco'
"""
if options.pattern != 'charuco': return Falsen_boards = len(options.size) if (n_boards != len(options.square) or n_boards != len(options.charuco_marker_size) or n_boards != len(options.aruco_dict)): parser.error("When using ChArUco boards, --size, --square, --charuco_marker_size, and --aruco_dict " + "must be specified for each board") return False # TODO: check for fisheye and stereo (not implemented with ChArUco) return Truedef main():
from optparse import OptionParser, OptionGroup
rospy.loginfo("start camera_calibration")
parser = OptionParser("%prog --size SIZE1 --square SQUARE1 [ --size SIZE2 --square SQUARE2 ]",
description=None)
parser.add_option("-c", "--camera_name",
type="string", default='narrow_stereo',
help="name of the camera to appear in the calibration file")
group = OptionGroup(parser, "Chessboard Options",
"You must specify one or more chessboards as pairs of --size and --square options.")
group.add_option("-p", "--pattern",
type="string", default="chessboard",
help="calibration pattern to detect - 'chessboard', 'circles', 'acircles', 'charuco'\n" +
" if 'charuco' is used, a --charuco_marker_size and --aruco_dict argument must be supplied\n" +
" with each --size and --square argument")
group.add_option("-s", "--size",
action="append", default=[],
help="chessboard size as NxM, counting interior corners (e.g. a standard chessboard is 7x7)")
group.add_option("-q", "--square",
action="append", default=[],
help="chessboard square size in meters")
group.add_option("-m", "--charuco_marker_size",
action="append", default=[],
help="ArUco marker size (meters); only valid with-p charuco")
group.add_option("-d", "--aruco_dict",
action="append", default=[],
help="ArUco marker dictionary; only valid with-p charuco; one of 'aruco_orig', '4x4_250', " +
"'5x5_250', '6x6_250', '7x7_250'")
parser.add_option_group(group)
group = OptionGroup(parser, "ROS Communication Options")
group.add_option("--approximate",
type="float", default=0.0,
help="allow specified slop (in seconds) when pairing images from unsynchronized stereo cameras")
group.add_option("--no-service-check",
action="store_false", dest="service_check", default=True,
help="disable check for set_camera_info services at startup")
group.add_option("--queue-size",
type="int", default=1,
help="image queue size (default %default, set to 0 for unlimited)")
parser.add_option_group(group)
group = OptionGroup(parser, "Calibration Optimizer Options")
group.add_option("--fix-principal-point",
action="store_true", default=False,
help="for pinhole, fix the principal point at the image center")
group.add_option("--fix-aspect-ratio",
action="store_true", default=False,
help="for pinhole, enforce focal lengths (fx, fy) are equal")
group.add_option("--zero-tangent-dist",
action="store_true", default=False,
help="for pinhole, set tangential distortion coefficients (p1, p2) to zero")
group.add_option("-k", "--k-coefficients",
type="int", default=2, metavar="NUM_COEFFS",
help="for pinhole, number of radial distortion coefficients to use (up to 6, default %default)")group.add_option("--fisheye-recompute-extrinsicsts", action="store_true", default=False, help="for fisheye, extrinsic will be recomputed after each iteration of intrinsic optimization") group.add_option("--fisheye-fix-skew", action="store_true", default=False, help="for fisheye, skew coefficient (alpha) is set to zero and stay zero") group.add_option("--fisheye-fix-principal-point", action="store_true", default=False, help="for fisheye,fix the principal point at the image center") group.add_option("--fisheye-k-coefficients", type="int", default=4, metavar="NUM_COEFFS", help="for fisheye, number of radial distortion coefficients to use fixing to zero the rest (up to 4, default %default)") group.add_option("--fisheye-check-conditions", action="store_true", default=False, help="for fisheye, the functions will check validity of condition number") group.add_option("--disable_calib_cb_fast_check", action='store_true', default=False, help="uses the CALIB_CB_FAST_CHECK flag for findChessboardCorners") group.add_option("--max-chessboard-speed", type="float", default=-1.0, help="Do not use samples where the calibration pattern is moving faster \ than this speed in px/frame. Set to eg. 0.5 for rolling shutter cameras.") parser.add_option_group(group) options, args = parser.parse_args() if (len(options.size) != len(options.square)): parser.error("Number of size and square inputs must be the same!") if not options.square: options.square.append("0.108") options.size.append("8x6") boards = [] if options.pattern == "charuco" and optionsValidCharuco(options, parser): for (sz, sq, ms, ad) in zip(options.size, options.square, options.charuco_marker_size, options.aruco_dict): size = tuple([int(c) for c in sz.split('x')]) boards.append(ChessboardInfo('charuco', size[0], size[1], float(sq), float(ms), ad)) else: for (sz, sq) in zip(options.size, options.square): size = tuple([int(c) for c in sz.split('x')]) boards.append(ChessboardInfo(options.pattern, size[0], size[1], float(sq))) if options.approximate == 0.0: sync = message_filters.TimeSynchronizer else: sync = functools.partial(ApproximateTimeSynchronizer, slop=options.approximate) # Pinhole opencv calibration options parsing num_ks = options.k_coefficients calib_flags = 0 if options.fix_principal_point: calib_flags |= cv2.CALIB_FIX_PRINCIPAL_POINT if options.fix_aspect_ratio: calib_flags |= cv2.CALIB_FIX_ASPECT_RATIO if options.zero_tangent_dist: calib_flags |= cv2.CALIB_ZERO_TANGENT_DIST if (num_ks > 3): calib_flags |= cv2.CALIB_RATIONAL_MODEL if (num_ks < 6): calib_flags |= cv2.CALIB_FIX_K6 if (num_ks < 5): calib_flags |= cv2.CALIB_FIX_K5 if (num_ks < 4): calib_flags |= cv2.CALIB_FIX_K4 if (num_ks < 3): calib_flags |= cv2.CALIB_FIX_K3 if (num_ks < 2): calib_flags |= cv2.CALIB_FIX_K2 if (num_ks < 1): calib_flags |= cv2.CALIB_FIX_K1 # Opencv calibration flags parsing: num_ks = options.fisheye_k_coefficients fisheye_calib_flags = 0 if options.fisheye_fix_principal_point: fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_PRINCIPAL_POINT if options.fisheye_fix_skew: fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_SKEW if options.fisheye_recompute_extrinsicsts: fisheye_calib_flags |= cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC if options.fisheye_check_conditions: fisheye_calib_flags |= cv2.fisheye.CALIB_CHECK_COND if (num_ks < 4): fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_K4 if (num_ks < 3): fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_K3 if (num_ks < 2): fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_K2 if (num_ks < 1): fisheye_calib_flags |= cv2.fisheye.CALIB_FIX_K1 pattern = Patterns.Chessboard if options.pattern == 'circles': pattern = Patterns.Circles elif options.pattern == 'acircles': pattern = Patterns.ACircles elif options.pattern == 'charuco': pattern = Patterns.ChArUco elif options.pattern != 'chessboard': print('Unrecognized pattern %s, defaulting to chessboard' % options.pattern) if options.disable_calib_cb_fast_check: checkerboard_flags = 0 else: checkerboard_flags = cv2.CALIB_CB_FAST_CHECK rospy.init_node('cameracalibrator') node = OpenCVCalibrationNode(boards, options.service_check, sync, calib_flags, fisheye_calib_flags, pattern, options.camera_name, checkerboard_flags=checkerboard_flags, max_chessboard_speed=options.max_chessboard_speed, queue_size=options.queue_size) rospy.spin()if name == "main":
try:
main()
except Exception as e:
import traceback
traceback.print_exc() -
从您提供的描述和代码中,有几个可能的原因导致
cameracalibrator.py脚本的节点无法正确启动或接收数据,并且rospy.loginfo()没有被打印出来。下面是一些排查和解决这些问题的步骤:1. 检查 ROS 节点启动
首先确保
cameracalibrator.py脚本确实被 ROS 正确地启动了。您可以通过以下命令检查正在运行的节点:rosnode list查看列表中是否有
cameracalibrator节点。2. 检查日志输出
如果节点已经启动,但
rospy.loginfo()没有输出,可能是日志级别设置的问题。您可以尝试设置 ROS 的日志级别为 DEBUG 来查看更多信息:export ROSCONSOLE_CONFIG_FILE=/dev/null roscore & rosrun rqt_logger_level rqt_logger_level在
rqt_logger_level中,找到cameracalibrator节点,并将其日志级别设置为 DEBUG。3. 检查脚本参数
cameracalibrator.py脚本需要一些命令行参数来运行,比如--size和--square。确保这些参数在您的camera_calibration.launch文件中被正确设置并传递给脚本。例如:<node name="cameracalibrator" pkg="camera_calibration" type="cameracalibrator.py" output="screen" args="--size 8x6 --square 0.108 --camera_name=narrow_stereo"/>4. 检查 ROS 话题和消息类型
确保您的摄像头或其他传感器发布的话题和消息类型与
cameracalibrator.py脚本所期望的相匹配。您可以使用rostopic list和rostopic info <topic_name>来检查话题的发布者和订阅者以及消息类型。5. 检查依赖项
确保所有依赖的库(如
cv2、rospy、message_filters等)都已正确安装,并且版本兼容。6. 检查 ROS 环境
有时 ROS 环境的问题(如路径问题、权限问题等)也可能导致节点无法正确启动。尝试在一个干净的 ROS 环境中重新构建和运行您的项目。
7. 代码中的错误
您的代码中有一个潜在的错误:
if name == "main": try: main() except Exception as e: import traceback traceback.print_exc()这里
name变量没有在之前的代码中定义,它应该是__name__。所以,这行代码应该是:if __name__ == "__main__": try: main() except Exception as e: import traceback traceback.print_exc()8. 使用 roslaunch 检查
如果
camera_calibration.launch文件没有显示任何错误,但节点仍然不工作,尝试在命令行中直接运行cameracalibrator.py脚本,并带上适当的参数,看看是否能成功启动。9. 查看系统日志
有时系统日志(如
/var/log/syslog或/var/log/messages)中可能包含有关 ROS 节点启动失败的更多信息。通过以上步骤,您应该能够诊断出问题的原因,并采取相应的措施来解决问题。
以上为生成回答,仅供参考~