ros 一键安装错误 ros1
-
-
在ROS1的一键安装过程中,可能会遇到多种错误。以下是一些常见的错误及其解决方案:
一、常见错误及解决方案
-
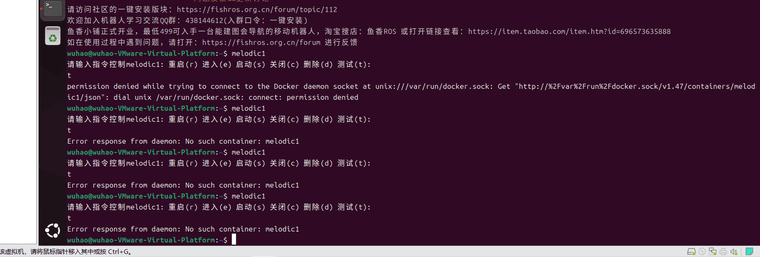
权限问题
- 问题描述:在安装或运行ROS时,可能会遇到权限不足的问题,导致无法访问某些文件或目录。
- 解决方案:使用
sudo命令提升权限,或者修改相关文件或目录的权限。例如,如果.ros目录权限不足,可以使用sudo chmod -R 777 ~/.ros命令来修改权限。
-
环境变量配置错误
- 问题描述:如果
.bashrc或.bash_profile等文件中的环境变量配置不正确,可能会导致ROS命令无法识别。 - 解决方案:检查并修改这些文件中的ROS环境变量配置。通常,需要在这些文件的末尾添加类似
source /opt/ros/<ros-version>/setup.bash的行,其中<ros-version>是ROS的版本号(如noetic、melodic等)。
- 问题描述:如果
-
依赖问题
- 问题描述:在安装ROS时,可能会因为缺少某些依赖包而导致安装失败。
- 解决方案:首先确保系统已经安装了所有必要的依赖包。可以使用
apt-get update和apt-get install命令来安装缺失的依赖包。对于ROS特定的依赖问题,可以尝试使用rosdep工具来解决。
-
网络问题
- 问题描述:由于ROS的源服务器可能位于国外,因此在下载ROS包时可能会遇到网络问题,导致下载失败或速度缓慢。
- 解决方案:可以尝试更换国内的ROS镜像源,或者使用代理服务器来加速下载。
-
版本冲突
- 问题描述:如果系统中已经安装了其他版本的ROS或Python等依赖软件,可能会导致版本冲突。
- 解决方案:检查并卸载与ROS冲突的软件版本,或者尝试在虚拟机中安装ROS以避免版本冲突。
-
rosdep init和rosdep update失败- 问题描述:这两个命令用于初始化rosdep并更新其数据源,但可能会因为网络问题或源服务器问题而失败。
- 解决方案:可以尝试使用一键解决工具(如rostaller)来自动处理这些问题。此外,也可以手动下载rosdep的数据源并放置到指定位置。
二、安装ROS1的通用步骤
- 添加ROS镜像源:编辑
/etc/apt/sources.list文件,添加ROS的官方源地址。 - 配置密钥:执行官方提供的命令来导入ROS的公钥。
- 更新软件包列表:使用
apt-get update命令更新本地的软件包列表。 - 安装ROS:使用
sudo apt install ros-<ros-version>-desktop-full命令安装ROS的完整桌面版(其中<ros-version>是ROS的版本号)。 - 配置环境变量:编辑
~/.bashrc文件,添加ROS的环境变量配置。 - 初始化ROS环境:执行
source ~/.bashrc命令来初始化ROS环境。
请注意,以上步骤和解决方案可能因ROS版本和操作系统版本的不同而有所差异。如果遇到具体问题,建议查阅ROS的官方文档或寻求社区的帮助。
以上为生成回答,仅供参考~
-