紧急通知:禁止一切关于政治&VPN翻墙等话题,发现相关帖子会立马删除封号
小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
第六章xacro变为urdf后在rviz2中没有机器人模型但是有tf坐标变换
-
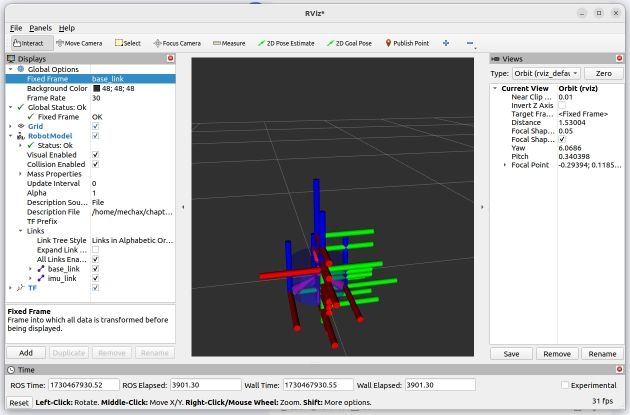
使用xacro将fishbot.xacro.urdf转为urdf后重新编译工作空间,运行Launch后找不到机器人模型,但是tf坐标变换都在,不知道甚么原因。我是用github克隆的chapt7 -
在使用xacro将
fishbot.xacro.urdf转为URDF后,如果在Rviz2中看不到机器人模型但tf坐标变换存在,可能的原因和解决方案如下:可能的原因
-
URDF文件转换问题:
- 在将xacro文件转换为URDF文件时,可能存在语法错误或转换不完全的问题。
- 确保使用了正确的命令进行转换,例如
rosrun xacro xacro your_robot.urdf.xacro > your_robot.urdf(注意,这里的your_robot.urdf.xacro和your_robot.urdf需要替换为你的实际文件名)。
-
Launch文件配置问题:
- 检查Launch文件是否正确设置了
robot_description参数,该参数应指向转换后的URDF文件。 - 确保Launch文件中启动了
rviz节点,并且rviz节点能够正确加载robot_description参数。
- 检查Launch文件是否正确设置了
-
Rviz2显示设置问题:
- 在Rviz2中,需要手动添加机器人显示组件才能看到机器人模型。
- 检查是否已正确添加机器人显示组件,包括机器人模型、关节、坐标系等。
-
TF坐标变换问题:
- 尽管tf坐标变换存在,但如果URDF文件中的关节或连杆定义不正确,也可能导致机器人模型无法正确显示。
- 检查URDF文件中的关节和连杆定义,确保它们正确连接并定义了正确的变换关系。
解决方案
-
重新转换URDF文件:
- 确保使用正确的命令和语法重新转换xacro文件为URDF文件。
- 仔细检查转换后的URDF文件,确保没有语法错误或遗漏的部分。
-
检查并修改Launch文件:
- 确保Launch文件中正确设置了
robot_description参数,并指向了正确的URDF文件路径。 - 确保Launch文件中包含了启动
rviz节点的命令,并且rviz节点能够正确加载robot_description参数。
- 确保Launch文件中正确设置了
-
在Rviz2中正确添加显示组件:
- 启动Rviz2后,手动添加机器人显示组件,包括机器人模型、关节、坐标系等。
- 确保已正确配置所有必要的显示组件,以便能够正确显示机器人模型。
-
检查URDF文件中的关节和连杆定义:
- 仔细检查URDF文件中的关节和连杆定义,确保它们正确连接并定义了正确的变换关系。
- 如果发现问题,请修改URDF文件并重新编译工作空间。
-
确保所有依赖项都已正确安装:
- 检查是否已正确安装了所有必要的ROS包和依赖项。
- 如果缺少某些包或依赖项,请安装它们并重新编译工作空间。
-
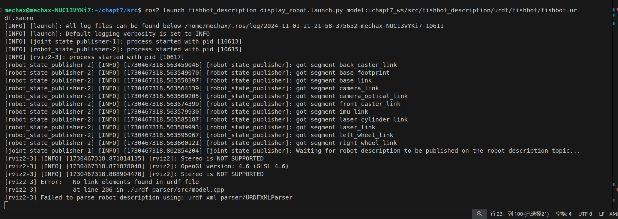
查看日志和错误信息:
- 检查ROS日志和错误信息,以获取有关机器人模型无法显示的更多详细信息。
- 根据日志和错误信息中的提示进行故障排除和修复。
综上所述,如果在Rviz2中看不到机器人模型但tf坐标变换存在,可能是由于URDF文件转换问题、Launch文件配置问题、Rviz2显示设置问题或TF坐标变换问题导致的。通过仔细检查并修改这些问题,应该能够解决机器人模型无法显示的问题。
以上为生成回答,仅供参考~
-