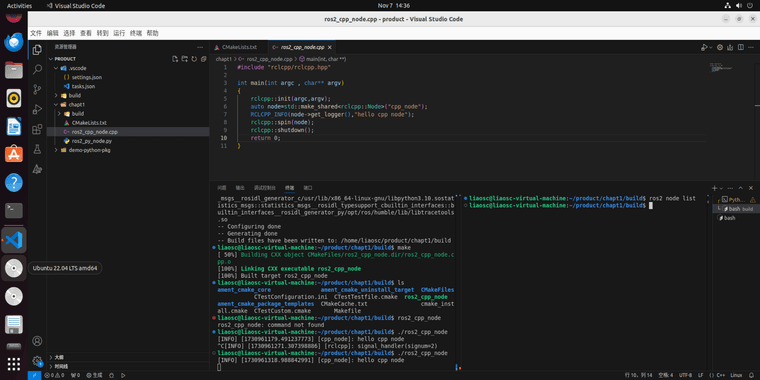
cpp节点运行起来,但是ros2 node list看不到节点在运行
-
cpp节点运行起来,但是ros2 node list看不到节点在运行
-
当您在ROS 2中运行一个C++节点,但使用
ros2 node list命令无法看到该节点时,可能有几个原因和相应的解决方法。以下是一些常见的排查步骤:-
确认ROS 2环境已正确设置:
确保您的终端已经source了ROS 2的安装目录和工作空间的setup.bash文件。例如:source /opt/ros/foxy/setup.bash source ~/your_ros2_workspace/install/setup.bash -
检查节点是否真在运行:
确保您的C++节点确实在运行。您可以通过添加日志输出或使用调试工具来确认节点代码正在执行。例如,在节点启动的初始位置添加一些打印语句。 -
检查节点是否连接到了正确的ROS 2网络:
ROS 2节点需要连接到特定的ROS网络(也称为域ID)。默认情况下,所有的ROS 2节点都连接到域ID为0的网络。如果您更改了节点的域ID或运行了多个ROS 2主节点(Master),请确保您正在查看正确的网络。可以使用--domain-id选项来指定域ID,例如:ros2 node list --domain-id <your_domain_id> -
检查节点是否是在正确的ROS 2命名空间中:
如果节点在特定的ROS 2命名空间中运行,您可能需要指定命名空间来查看该节点。通常,ros2 node list会显示所有命名空间中的节点,但确认一下是否有命名空间的影响也是好的。 -
检查ROS 2守护进程(Daemon):
ROS 2使用守护进程(Daemon)来管理节点和服务的注册。如果守护进程没有正确运行,节点可能无法被正确注册。您可以尝试重启ROS 2守护进程,或检查是否有错误日志。 -
查看日志输出:
使用ros2 log list和ros2 log show <logger_name>来查看是否有与节点相关的错误或警告信息。这可以帮助您诊断问题。 -
检查网络问题:
如果您的机器配置了复杂的网络设置(如防火墙、虚拟网络等),确保ROS 2通信所需的端口(默认是11311到11511)没有被阻塞。 -
使用不同的终端或会话:
有时候,特别是在使用某些IDE或编辑器时,环境变量可能没有正确设置。尝试在普通的终端中运行您的节点和命令。
通过以上步骤,您应该能够诊断出为什么
ros2 node list无法看到您的C++节点。如果问题仍然存在,可能需要更详细地检查您的ROS 2安装和配置,或者寻求社区的帮助。
以上为生成回答,仅供参考~
-