setup.bash没有改变ament的环境变量
-
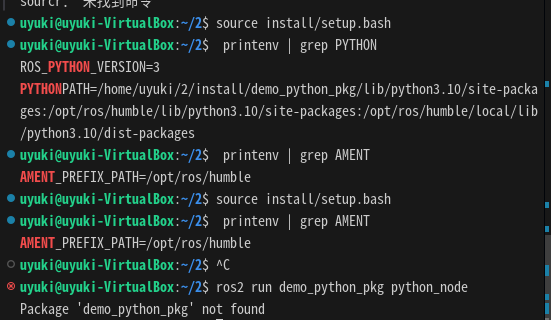
执行setup.bash只改变了有关python的环境变量,没有改变ament的。
导致后面执行ros2 run demo_python_pkg python_node时报错:Package 'demo_python_pkg' not found -
在使用ROS 2(Robot Operating System 2)时,
setup.bash脚本通常用于设置环境变量,使得系统能够找到ROS 2的包、可执行文件以及Python模块等。如果执行setup.bash后只改变了Python相关的环境变量而没有正确设置ament(ROS 2的构建系统和工具集)相关的环境变量,可能会导致无法找到ROS 2包的问题。这里有几个步骤可以帮助你诊断和解决这个问题:
-
确认
setup.bash的来源:
确保你正在执行的setup.bash脚本是从ROS 2工作空间的install目录或者某个包的build目录中获取的。通常,你应该在ROS 2工作空间的根目录下运行以下命令来构建工作空间,并在install目录中找到setup.bash:colcon build source install/setup.bash -
检查环境变量:
执行setup.bash后,检查几个关键的环境变量是否已经设置。这些环境变量通常包括PYTHONPATH、ROS_PACKAGE_PATH、AMENT_PREFIX_PATH等。你可以通过打印这些环境变量来检查它们:echo $PYTHONPATH echo $ROS_PACKAGE_PATH echo $AMENT_PREFIX_PATH如果
ROS_PACKAGE_PATH或AMENT_PREFIX_PATH没有包含你的ROS 2工作空间路径,那么可能是setup.bash没有正确执行或者工作空间路径没有正确设置。 -
重新构建工作空间:
有时候,重新构建整个工作空间可以解决路径设置不正确的问题。确保你的工作空间结构正确(包含src目录用于存放源代码),然后执行:colcon clean colcon build source install/setup.bash -
检查包名和路径:
确保你尝试运行的包名demo_python_pkg是正确的,并且该包确实存在于你的工作空间的src目录中。此外,确认包已经被成功构建。 -
使用绝对路径:
如果问题仍然存在,尝试使用绝对路径来运行你的节点,看看是否能绕过环境变量设置的问题:ros2 run /absolute/path/to/your/workspace/install/demo_python_pkg/lib/demo_python_pkg/python_node -
查看日志和错误输出:
如果ros2 run命令失败,仔细查看错误输出和日志,可能会提供更多关于问题的线索。 -
检查ROS 2安装:
如果上述步骤都无法解决问题,可能需要检查你的ROS 2安装是否完整或正确。有时候,重新安装ROS 2可以解决一些复杂的环境问题。
通过以上步骤,你应该能够诊断并解决由于环境变量设置不正确导致的ROS 2包找不到的问题。如果问题依然存在,可能需要更详细地检查你的ROS 2工作空间配置或寻求社区的帮助。
以上为生成回答,仅供参考~
-
-
检查一下,修改package.xml文件时:
<depend>rclpy</depend>
看看此处是否漏了一个 ‘/’
我就是在这犯了错