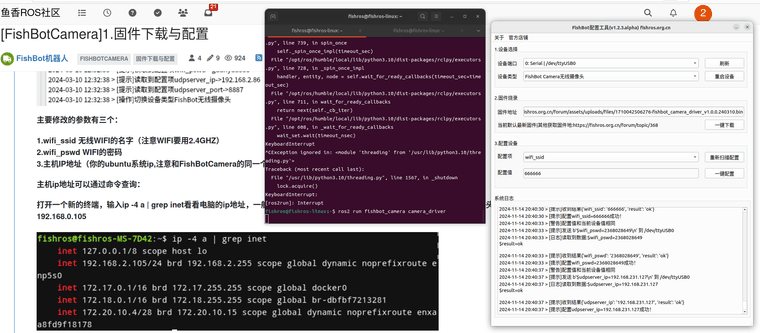
ros2 run fishbot_camera camera_driver一直不加载怎么解决
-
 ros2 run fishbot_camera camera_driver一直不加载怎么解决
ros2 run fishbot_camera camera_driver一直不加载怎么解决 -
当你尝试使用
ros2 run fishbot_camera camera_driver命令运行一个 ROS 2 节点,但节点一直没有加载时,可能有多种原因导致这个问题。以下是一些解决步骤,可以帮助你诊断并解决问题:-
检查节点是否存在:
- 确保
fishbot_camera包中确实有一个名为camera_driver的节点。 - 查看包的
CMakeLists.txt或setup.py文件,确认节点是否已被正确构建和安装。
- 确保
-
检查包是否已正确安装:
- 使用
ros2 pkg list查看已安装的包列表,确认fishbot_camera是否在列。 - 如果包未安装,使用
colcon build --packages-select fishbot_camera或相应的安装命令来构建和安装。
- 使用
-
检查环境变量:
- 确保你的 ROS 2 工作空间已被正确设置。使用
source install/setup.bash(对于 Bash shell)或相应的命令来设置环境变量。 - 检查
ROS_PACKAGE_PATH环境变量是否包含你的工作空间目录。
- 确保你的 ROS 2 工作空间已被正确设置。使用
-
检查依赖关系:
- 确保
fishbot_camera包的所有依赖都已正确安装。 - 查看
package.xml文件中的<build_depend>和<exec_depend>标签,确保所有依赖包都已安装。
- 确保
-
查看日志输出:
- 运行命令时加上
--verbose选项,如ros2 run --verbose fishbot_camera camera_driver,查看更详细的输出信息。 - 检查 ROS 2 的日志输出,使用
ros2 log list查看活动日志,并使用ros2 log show <logger_name>查看具体日志内容。
- 运行命令时加上
-
检查硬件和驱动问题:
- 如果
camera_driver依赖于特定的硬件(如相机),确保硬件已正确连接并可用。 - 检查是否有必要的驱动或固件需要安装或更新。
- 如果
-
权限问题:
- 确保你有足够的权限来访问和启动相机驱动。
- 在 Linux 上,你可能需要使用
sudo或更改设备文件的权限。
-
尝试重新构建和清理:
- 如果之前构建失败或有残留文件,尝试清理工作空间后重新构建。使用
colcon clean清理工作空间,然后重新构建。
- 如果之前构建失败或有残留文件,尝试清理工作空间后重新构建。使用
通过上述步骤,你应该能够诊断并解决
ros2 run fishbot_camera camera_driver不加载的问题。如果问题仍然存在,可能需要更详细地检查代码或寻求社区的帮助。
以上为生成回答,仅供参考~
-
-
@2368028649 刚才好像看到你有打印日志了,解决了吗