关于书籍7.2.1节源码map节点不存在问题求解答
-
1.我直接将第7章源码拷贝到本地
2.编译后运行了:ros2 launch fishbot_description gazebo_sim.launch.py
3.接着运行建图:ros2 launch slam_toolbox online_async_launch.py use_sim_time:=True
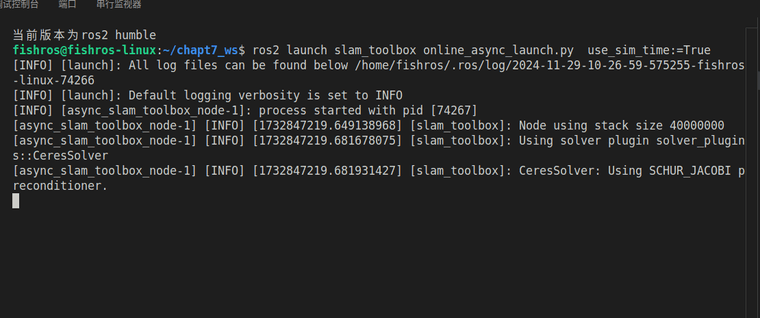
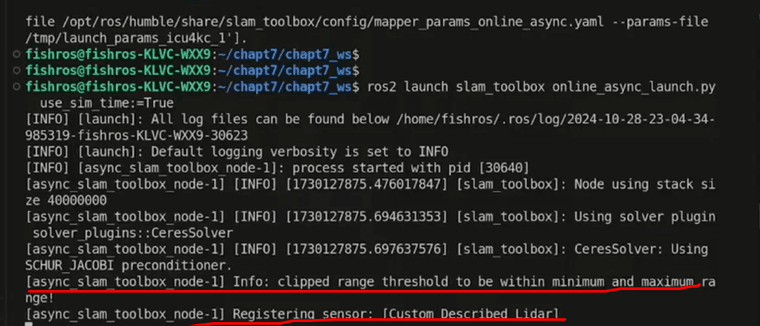
3.1鱼香ros的视频中终端会多出2行,这是疑问1???
4.启动rviz2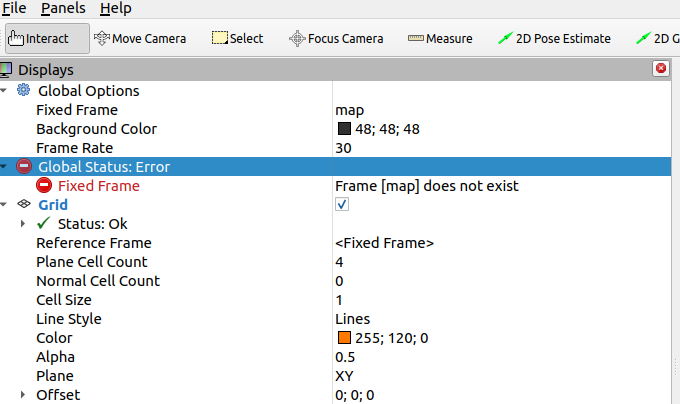
5.添加map话题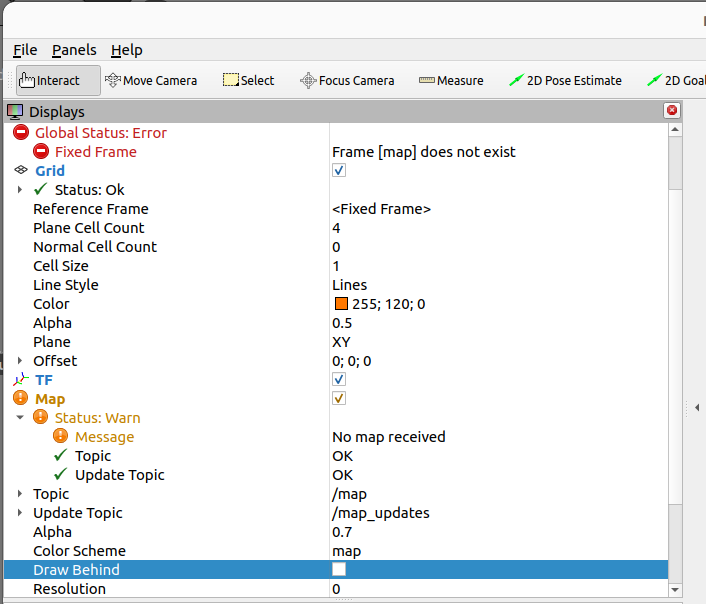
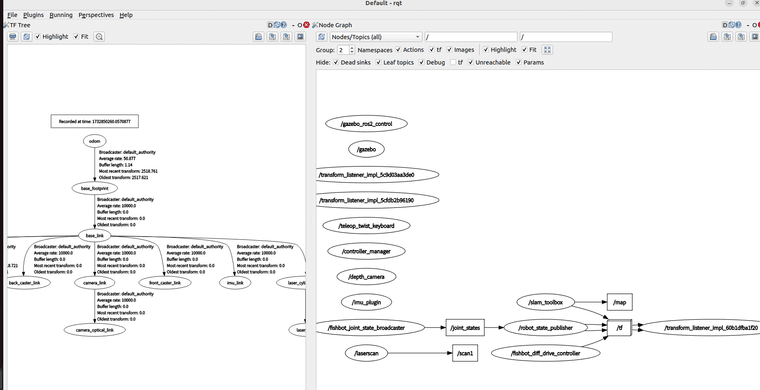
6.添加laserScan话题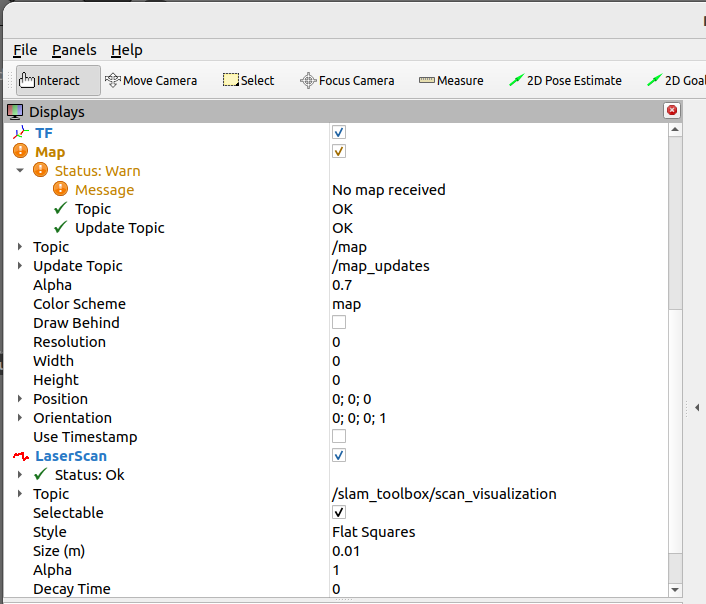
6.1这个LaserScan存在3个话题/scan /scan1 /slam_toolx/scan_visualization,这个scan1在rviz跟换坐标系时,可以显示激光点
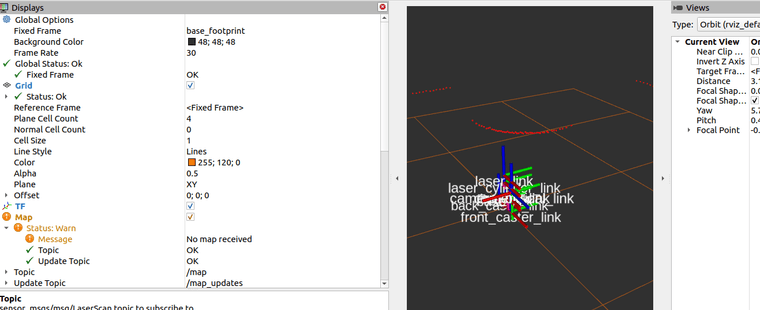

7.重新修改固定坐标系为map,始终map显示红色
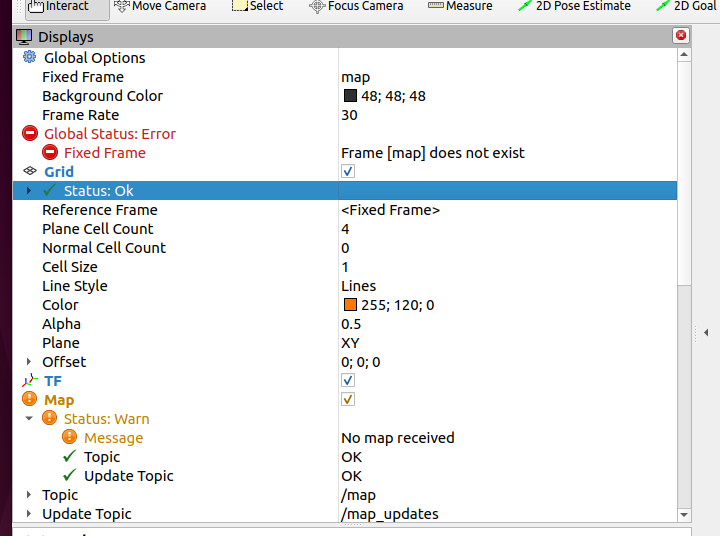
8.查看rqt_tree,始终看不到最顶上的map节点
-
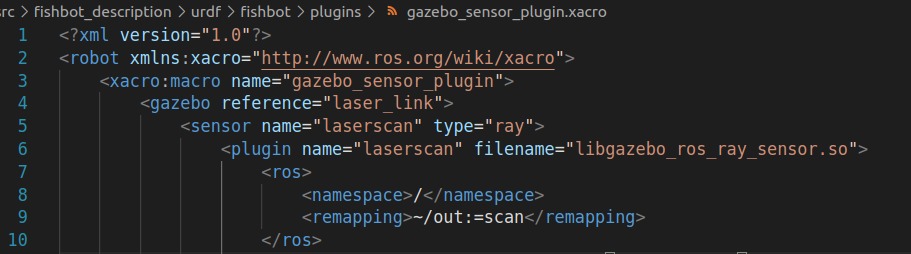
我已经找到原因,是因为salm_toolbox订阅的是/scan话题,而第7章激光雷达源码是scan1话题,修改下就好了,所有视频跟鱼哥讲的一致
-
@751301924 哦豁 真的是scan1的问题 ,直接贴过来还是要好好检查。找了好长时间问题。
-
可以的 找了好久这个问题终于找到了
-
@13402998086 请问,这个在哪里改啊,不是很懂